




A sandrail, also called a sand rail, rail, or sand car, is a lightweight off-road motor vehicle specifically built for traveling in sandy terrain. Synonymously referred to as dune buggies, a sandrail is a type of speciality vehicle.[1] They are popularly operated on actual sand dunes. Sandrails can be driven on other types of terrain but are designed specifically for sand.


At the end of World War II thousands of soldiers returning from the war had spent years driving Jeeps, tanks, and half-tracks with few or no roads. Having an increased disposable income, these GIs formed the original core of off-road enthusiasts. Initially, they used surplus Jeeps and cut-up cars to build their off-road vehicles. Soon these "off-roaders" discovered that with little more than a skid plate, they could get a stock air-cooled Volkswagen Beetle to go almost anywhere.[2] Throughout the 1950s the sport continued to develop.
In 1958 Pete Beiring of Oceano, Calif., took the body frame or "pan" from a damaged Volkswagen and shortened it into a new machine that eventually became the precursor to the dune buggy. This eventually led to the first production dune buggy called the "Sportster", which was developed around 1960 by the EMPI Imp Company. It was an angular sheet metal vehicle built on a stripped-down Volkswagen chassis. Many others followed including the ever popular Meyers Manx design.[3] Dune buggies had a style all their own with fiberglass siding and other "heavy" body features.
As the late 1960s and early '70s approached, enthusiasts developed lighter and more powerful sand vehicles capable of ascending steeper and higher dunes. Many started experimenting at home by building super light weight vehicle frames from metal tubing, often without a roll cage. Many were nothing more than a frame, engine, transmission, wheels and one or two seats. Because of their versatility, light weight and simplicity the air-cooled Volkswagen engine and transmission were the power plant of choice for many owners. By placing the motor and transmission in the rear of the frame it allowed the front of the sandrail to remain extremely light and thus able to "float" over the sand dunes. An added value of placing the engine in the rear of the vehicle was that heat created by the motor did not blow into the face of the driver and passengers. From the 1970s forward, sandrail builders continued to push the delicate balance between weight and power.
When it comes to serious sand dunes, most off-road vehicles including those with four wheel drive are relatively top heavy and can only safely climb or descend steep hills with a mostly perpendicular approach to inclines or downhills. In the case of driving up a steep sand dune, many would simply "dig-in" and get stuck.
Sandrails are ultra lightweight vehicles often weighing in at 800 and 1500 pounds (≈363 and ≈680 kg). They typically use high flotation smooth or farm implement front tires and special rear paddle tires, allowing it to skim over the surface of the sand without getting stuck. A sandrail has a low center of gravity, permitting it to make tight turns even on the face of a sand dune.
Sandrail frames are built from a tubular space frame chassis that incorporates an integrated roll cage. The distinction between a sandrail and dune buggy or sand car is that the sandrail will rarely have windows, doors, fenders, or full body panels. The sandrail will also be a lighter weight vehicle compared to the sandcar. On most sandrails, the engine is typically at the rear. Some sandrails also use a mid-engine configuration. This design offers favorable weight distribution and traction, which is very desirable for dune "hill-climbing".

Originally becoming popular in the 1960s, sandrails used lightweight air-cooled engines like the Volkswagen engine from the VW Beetle and Porsche (~200 pounds) or the Chevrolet Corvair, Mitsubishi Minica and Cosworth DFV (~350 pounds). Because of the availability of affordable parts, the Volkswagen engine continues to be the mainstay of many sandrails today. At some point in the late 1970s in the wake of the Ford Pinto product liability cases, the first alternative engine was sourced from the Pinto, primarily the 2.0L and 2.3L. More recently, some enthusiasts have turned to lighter weight water-cooled engines such as the Subaru boxer or GM Ecotec engines.[4]
The need for more power comes from necessity and desire when driving in steep sand dunes. This has driven sandrail engine builders to add performance features to engines such as the stock (24 to 50 horse power) Volkswagen engine. These include: larger pistons, turbochargers, dual racing carburetors, fuel injection, and high performance cylinder heads. Some performance engines can run on premium unleaded gasoline. However, many high performance engines must use racing fuel or fuel additives. A high performance sandrail Volkswagen engine can produce well into the 170-200+ horse power range and as high as 700 horse power with methanol fuel.[5]
Most sandrails use a manual transmission, although automatic transmissions are used as well.[6][page needed]
Early sandrails often consisted of little more than a steering wheel, brakes and accelerator. However, today an entire industry is built around all kinds of accessories such as HID and LED headlamps, radios, passenger communications headsets and GPS navigation devices.

Some states in the USA, such as Arizona and Utah, allow the registration of sandrails and other primarily off-road vehicles for "on-road" use. In these states, sandrails registered for on-road use usually must meet the minimum insurance coverage required by normal vehicles.[7] Additionally, they may require modifications to be road worthy. These requirements typically include a wind shield, turning signals, and license plate. These requirements may vary by state.
Sandrails have been employed by US state authorities, the United States Border Patrol and even the military. They are still in use today by the Navy SEALs. The military design of these vehicles is based on the Chenowth Advanced Light Strike Vehicle model and have been modified for a third seat above the engine to control a .50 caliber machine gun and other armaments. State authorities, such as rangers at sand dune parks sometimes employ sandrails, removing the passenger seat to convert the sandrail into a makeshift ambulance with a stretcher.
Although sandrails are primarily designed for the sand, they have been successfully used on "soft pack" dirt, mud and even snow. Some of these types of applications usually require the use of off-road type tires versus "sand" tires. They are typically not well suited for rocky terrain due to their mostly limited suspension and lighter duty frames.
Accidents most often occur in collisions with other off-road vehicles, and are frequently the result of not being seen. In many dune areas, all sand vehicles (motorcycles, quads, sandrails, UTVs and sandcars) are required to use an eight-foot antenna whip and flag. This is critical to being seen by other vehicles as a driver traverses from one dune to the next.[8] Most sandrails employ a variety of safety features for the driver and passengers. The most common is the use of a three-point safety belt system. Many sand rails also utilize roll bar padding and fire extinguishers. More advanced safety features sometimes include: arm and wrist restraints, netting for large frame openings, automatic fuel cut-off switches and horns. Additionally, the use of eye protection (goggles and ballistic-grade glasses) is considered a necessity. Finally, the use of helmets while "duning" is increasing due to the advances in performance. Sand associations along with state and federal land management agencies work to provide dune safety information through pamphlets, online and in classes.

Due to its economical cost to build and maintain, access to new parts and good balance between weight and power, the sandrail continues to be used by many enthusiasts today.[9] However, the heavier and typically more powerful sandcar now represents another style for duners.[1] This style often employs mammoth cars weighing several thousand pounds and using highly advanced suspension systems and transmissions coupled with large performance V8 engines such as the latest GM LS engine series, Ford Coyote engine series or Range Rover engine series.
Associations such as ASA hold events throughout the year in some parts of the country for sand racing and hill climbing. Additionally, these associations provide representation for enthusiasts with legislators and land management officials.
cite journal: Missing or empty |title= (help)cite journal: Missing or empty |title= (help)cite journal: Missing or empty |title= (help)

KTM Motorcycles headquarters in Mattighofen
|
|
| Industry | Motor vehicles |
|---|---|
| Founded | 1934 |
| Founder | Hans Trunkenpolz |
| Headquarters |
Mattighofen, Upper Austria
,
Austria
|
|
Area served
|
Worldwide |
|
Key people
|
Gottfried Neumeister (chairman and CEO of the executive board)[1] |
| Products | Motorcycles, sports cars |
| Owner | Bajaj Auto (≈75% via Bajaj Mobility AG)[2] |
|
Number of employees
|
|
| Subsidiaries | Husqvarna Motorcycles GasGas WP Suspension |
| Website | ktmgroup.com ktm.com |
| Company type | Private |
|---|---|
| Industry | Bicycles |
| Founded | 1934 |
| Founder | Hans Trunkenpolz |
| Headquarters |
Wels, Upper Austria
,
Austria
|
|
Key people
|
Carol Urkauf-Chen Johanna Urkauf Stefan Limbrunner |
|
Number of employees
|
800 (2022)[4] |
| Website | www |
KTM AG ( German pronunciation: [kˌɑːtˌeːˈɛm]) is an Austrian motorcycle, bicycle and motorsports brand. It traces its foundation to 1934 as Kronreif & Trunkenpolz Mattighofen. Today, Bajaj Mobility AG (formerly Pierer Mobility AG) operates as the manufacturer of KTM-branded motorcycles, and KTM Fahrrad GmbH operates as the manufacturer of KTM-branded bicycles.
KTM is known for its off-road motorcycles and as a reputed MotoGP constructor.
In November 2025, it was announced that Bajaj Auto had completed the acquisition of a controlling stake in KTM for €800 million, increasing its indirect holding to approximately 75%.[5]

In 1934, Austrian engineer Johann (Hans) Trunkenpolz (1909–1962)[6] set up a fitter's and car repair shop[7] in Mattighofen. In 1937, he started selling DKW motorcycles, and Opel cars the following year. His shop was known as Kraftfahrzeug Trunkenpolz Mattighofen, but the name was unregistered. During the Second World War, his wife took care of the business which was thriving mainly on account of diesel engine repairs.[8]
After the war, demand for repair works fell sharply and Trunkenpolz started thinking about producing his own motorcycles. The prototype of his first motorcycle, the R100, was built in 1951.[9] The components of the motorcycle were produced in house, except for the Rotax engines which were made by Fichtel & Sachs. Serial production of the R100 started in 1953. With just 20 employees, motorcycles were built at a rate of three per day.[10]
In 1953, businessman Ernst Kronreif became a major shareholder of the company, which was renamed and registered as Kronreif & Trunkenpolz Mattighofen. In 1954, the R125 Tourist was introduced,[11] followed by the Grand Tourist[12] and the scooter Mirabell[13] in 1955.
The company secured its first racing title in the 1954 Austrian 125cc national championship.[14] In 1956, KTM made its appearance at the International Six Days Trials, where Egon Dornauer won a gold medal on a KTM machine.[15]
In 1957, KTM built its first sports motorcycle, the Trophy 125cc.[16] KTM's first moped, named Mecky, was launched in 1957, followed by Ponny I in 1960 and Ponny II in 1962 and Comet in 1963.[17] The 1960s also saw the beginning of bicycle production in Mattighofen.
Ernst Kronreif died in 1960.[18] Two years later in 1962,[19] Hans Trunkenpolz also died of a heart attack. His son, Erich Trunkenpolz, took charge of the company's management.
As the company continued to expand, the workforce totaled 400 in 1971, and forty years after it was founded, KTM was offering 42 different models. Additionally, KTM was able to produce motorcycles for the racing industry. During the 1970s and 80s, KTM also started to develop and produce engines and radiators. Radiators sold to European car manufacturers constituted a sizable part of the company's business in the 1980s.[20]
In 1978,[21] US subsidiary KTM North America Inc. was founded in Lorain, Ohio.
In 1980, the company was renamed KTM Motor-Fahrzeugbau KG.[20] One year later, KTM had about 700 employees and a turnover of 750m. Schilling (about 54.5m. euros). International business then amounted to 76% of the company's turnover.[20]
However, scooter and moped turnover sank rapidly, and production had to be halted in 1988.[20] Erich Trunkenpolz died in 1989. Takeover of a 51% interest in the company by the Austrian investment trust GIT Trust Holding controlled by Austrian politician Josef Taus in 1989 was followed by unsuccessful attempts to turn the indebted company around,[22] and in 1991, management of KTM was transferred to a consortium of creditor banks.
In 1991, the company was split into four new entities: KTM Sportmotorcycle GmbH (motorcycles division), KTM Fahrrad GmbH (bicycles division), KTM Kühler GmbH (radiators division) and KTM Werkzeugbau GmbH (tooling division).
After the split, Urcauf family took over the bicycle division KTM Fahrrad GmbH in 1992.
In 1994, they started producing bikes with aluminium frames and electric bikes.
In 1996, Carol Urkauf-Chen takes over the company.
In 1998, They adopt orange colour in their logo.
In 2006 they launch bikes with full carbon frame.
In 2007, they shift to a new headquarter in Wels, Upper Austria.
In 2018 Owner Carol Urkauf-Chen moves to the supervisory board, Johanna Urkauf and Stefan Limbrunner act as managing directors.
Austrian Automotive entrepreneur Stefan Peirer took control of KTM Motorcycles in 1992 and later took over the sibling tooling division KTM Werkzeugbau. In the following years, while steadily increasing production and turnover, investing in new production and R&D facilities,[23][24][25] introducing new models and successfully sponsoring and taking part in various sports racing events, the company underwent a series of restructurings and stakeholder changes guided by KTM's managing director Stefan Pierer.
In 1994, KTM started production of the Duke series of road motorcycles; in 1996, KTM motocross machines were first decked out in KTM's signature orange color,[26] and 1997 saw the introduction of liquid-cooled two-cylinder Supermoto and Adventure motorcycles. In 2007, the company debuted the KTM X-Bow sports car.[27]
In 1995, KTM acquired Swedish motorcycle maker Husaberg AB and took control of the Dutch company WP Suspension.
In 2007, Indian motorcycle manufacturer Bajaj Auto acquired a 14.5% stake in KTM; which by 2013, increased to 47.97%.
In 2010 KTM Kühler divested their automotive radiator business to Mahle GmbH and the motorcycle radiator business to WP Suspension under WP Radiator brand.[28]
In 2013, KTM acquired the formerly Swedish motorcycle maker Husqvarna Motorcycles from its prior owner BMW.[23] The same year, KTM re-integrated the brand Husaberg into Husqvarna Motorcycles from which it had spun off in the 1990s when Husqvarna was sold to the Italian company Cagiva. In 2019, KTM acquired a majority stake of 60% in the Spanish enduro motorcycle brand GasGas.[29] In 2020 GasGas became a wholly owned subsidiary of KTM.[30]
In 2021 Bajaj Auto sold 46.5% of KTM's shares to Pierer Mobility AG in exchange for 49% shares in the latter company[31] and thus became an indirect stakeholder in KTM.
In 2022, KTM's Parent Company Pierer Mobility acquired a 25.1% stake in Italian motorcycle company MV Agusta;[32] and increased to a majority 50.1% in 2024.[33]
In 2023 Pierer Mobility's financial situation became increasingly unsustainable and by 2024 they had a heavy debt to pay off.[34] In 2024 KTM went into self imposed administration.[35] Pierer Mobility was compelled to sell their stake in MV Agusta back to the previous owners the Sardarov family.[36]
In the early 2025 Stefan Pierer started exiting from executives roles in KTM and its affiliates, making way for new investors.[37]
In 2025, Bajaj Auto, who were until now holding 49% stake in Pierer Mobility had offerred to take full control of KTM and its sister concerns by an 800 million Euro debt package. The deal was concluded in November 2025. Pierer Mobility is due to be rennamed as Bajaj Mobility which will hold 74.94% shares in KTM; rest of which lies in public hands.
At present, KTM brand is operated by two corporate houses-
KTM has facilities in Austria, India (partnership with Bajaj), and China (partnership with CFMoto) producing over 380,000 motorcycles (290,000 KTM models) in 2023.[38][39] The main production site located at Mattighofen, Austria manufacturers majority of the models. In collaboration with Bajaj, the facilitiy located in Pune, India is responsible for producing smaller displacement motorcycles, including the Duke and RC series, for both the domestic and international markets.[40] KTM and CFMOTO oversee the global production of the two LC8c models (790 Duke and 790 Adventure) in Hangzhou, China.
Furthermore, KTM Sportmotorcycle GmbH and Husqvarna Motorcycles GmbH operate 24 and 8 distribution subsidiaries worldwide, respectively, most of them in European and Asian countries and in the US.
KTM started exporting their GS model to the US in 1968 through an American importer, John Penton under the Penton brand. This joint venture lasted until KTM established KTM America Inc. in Ohio in 1978.[41]
In 2005, KTM-Sportmotocycle began a partnership with ATV manufacturer Polaris Industries with the goal of shared research, and more importantly shared distribution networks. This partnership was a two-year trial arrangement, at the end of which both parties had the option of merging the two companies into one. In 2006, KTM announced that the partnership with Polaris had been downgraded, and would instead only supply their 450cc and 510cc RFS engines to Polaris.[42]
In January 2008, Bajaj announced that it would jointly develop two new 125cc and 200cc bikes for Europe and the Far East. The bikes would be badged KTM.[43] In January 2012, Bajaj launched the Duke 200 model in India.[44]
In November 2022 KTM acquired a 25,1 % stake in the Italian motorcycle manufacturer MV Agusta.[45]
KTM as a brand is also used by KTM Fahrrad GmbH, which, as the exclusive licensee, manufactures bicycles and bicycle accessories. This company originated by the spin-off of KTM in 1991 and shares the same history and heritage as that of KTM Motorcycles.



KTM entered motorsports competing in motocross racing. KTM won its first championship in 1974 when Gennady Moiseyev claimed the 250cc Motocross World Championship.[46] By the end of 2016, KTM had won more than 260 world championship titles, making the company one of the most successful brands in motorsports.[23] KTM has claimed 96 MXGP, MX1 and MX2 world titles since 1974 and 114 E1, E2, E3 and Super Enduro world titles since 1990. With Ryan Dungey's 2015, 2016 and 2017 victories in the supercross world championship, KTM gained a successful presence in supercross racing as well. In 1994, a KTM factory team debuted at the Dakar Rally. In 1998, KTM riders won second to twelfth place. With consecutive wins from 2001 to 2019, the manufacturer has dominated the rally for 18 years now. KTM teams successfully compete in other rally raid events like the Atlas Rally or the Rallye du Maroc. KTM has won 37 cross country rallies world titles since 2003 and has won the FIM Cross-Country Rallies World Championship 15 times, most recently in 2015.
In 2003, KTM started sponsoring and supporting road racing in various capacities, with the most successful results stemming from their supermoto efforts. From 2003 to 2009, a KTM factory team competed in the 125 cc class of the motorcycle Grands Prix, and between 2005 and 2008 in the 250 cc class. Notable successes in the 125 cc class were the second and third place in the overall ranking scored in 2005 by KTM riders Mika Kallio and Gábor Talmácsi, the second place in 2006 by Mika Kallio, the third place in 2007 by Tomoyoshi Koyama and the 2005 KTM victory in the 125 cc constructor's championship. In the 250 cc class, Mika Kallio won third place in 2008. Since the first Rookies Cup season in 2007, KTM has supplied the bike for the Red Bull MotoGP Rookies Cup.
In 2009, KTM announced their withdrawal from Grand Prix motorcycle racing in all classes, and did not return until 2012 in the new Moto3 class.
In 2012, KTM won the Moto3 manufacturers' championship. During the next season, KTM riders prevailed in every race of the Moto3 class and won the world title as well as second and third place, making KTM the obvious victor of the manufacturers' standing. KTM won the manufacturer title in the 2014 and 2016 as well as the world title in 2016 in the Moto3 class. Starting in 2017, KTM fields bikes in both MotoGP and Moto2 classes as well. The main class team features Jack Miller and Brad Binder as full-season riders, Mika Kallio as wildcard rider, and Dani Pedrosa as test/development rider. The Moto2 KTM Ajo team features Pedro Acosta and Albert Arenas. Steadfastly independent and confident of their company's abilities, KTM chose to use a steel trellis frame where all other manufacturers used aluminum. In addition, KTM insisted on developing their own racing suspension through their WP subsidiary (all other manufacturers used Öhlins). KTM demonstrated their prowess in doing things their own way by winning their first Moto GP premier class race on August 9, 2020, with rookie Brad Binder crossing the finish line in first place.
From 2009[47] to 2011,[48] KTM teams competed in the IDM, the Superbike International German Championships. There were speculations about a possible KTM foray[49] into the superbike world championship. Due to the company's focus shifting away from the RC8 and generally superbike design, these plans are off the table for the foreseeable future.[50]
KTM's official company/team colours are orange, black and silver. To create a strong brand identity, all competition-ready KTMs come from the factory with bright orange plastic with "KTM" emblazoned on the side of the radiator shrouds. All KTM bikes also come from the factory with a Motorex sticker on the outside of the motor. All first fills of oil come from Motorex as well. Some official KTM teams use different colors for their bikes, most noticeably in the Dakar Rally.
KTM manufactures a wide range of off-road motorcycles. Not all of their models are available in every country. The following section lists bikes that are sold in the US.
Motocross – The current Motocross line designated by SX includes 50, 65, 85, 105, 125, 150, 250 and 300 cc single-cylinder two-stroke models (the 50 SX, 65 SX and 85 SX models are kids' and youth bikes), and 250, 350 and 450 cc single-cylinder four-stroke models (SX-F).[51] In 2005 KTM released the new 250SX-F to the general public. Since 2007, the SX-F's have been KTM's new racing motocross range. Current versions of the KTM SX-F line have a dual overhead camshaft engine dubbed the “RC4”.
Cross-Country – The current cross-country line designated by XC includes 150, 250 and 300 cc two-stroke models and 250, 350 and 450 cc four-stroke models. The two-stroke XC machines except the 150 cc model are available with either wide-ratio or close-ratio transmission (when switching gears, there is a more or less pronounced rpm change). The four-stroke models are fitted with a semi-close ratio gearbox. Most models are equipped with an electric starter.[52]
The very lightweight XC bikes are competition bikes only; they do not meet homologation regulations.
Enduro – The street-legal EXC enduro versions of KTM's XC cross-country bikes are supplied with plusher non-linkage suspensions, a wider-ratio gear box and lights.
The current line available in the US consists of 350, 450 and 500 (actually 510 cc) four-stroke EXC models.[52]
Free Ride – A KTM original class of off-road motorcycle that could be described as a cross between Enduro and trials bikes. The Freeride 250R is powered by a lighter, modified version of the 250 EXC Enduro engine and has a specially developed six-speed gearbox with close transmission ratios in the lower gears and a wide ratio for the sixth gear.[53] A four-stroke 350 cc free ride model with similar characteristics,[54] and the all-electric single-speed models Freeride E-SX, Freeride E-XC as well as their street version Freeride E-SM are available in Europe.[55]
| Category | Model | Engine Type | Engine Designation | Status | Picture |
|---|---|---|---|---|---|
| Motocross | SX | 2-Stroke | 50cc; 65cc; 85cc; 125cc; 250cc; 300cc | In Production |  450 SX-F |
| SX-F | 4-Stroke | 250cc; 350cc; 450cc | In Production | ||
| SX-E | Electric | 1.8KW; 3.8KW; 5.0 KW | In Production | ||
| Freeride | E-XC | Electric | 18KW | In Production |  Freeride E-XC |
| Enduro | EXC | 2-Stroke | 125cc; 150cc; 250cc; 300cc | In Production |  350 EXC-F |
| XC-W | 2-Stroke | 150cc; 250cc; 300cc | In Production | ||
| EXC-F | 4-Stroke | 450cc | Old | ||
| EXC-F Plated |
4-Stroke | 350cc; 500cc | In Production | ||
| XCF-W | 4-Stroke | 450cc | In Production | ||
| Cross Country | XC | 2-Stroke | 250cc; 300cc | In Production |  300XC |
| XC-F | 4-Stroke | 250cc; 350cc; 450cc | In Production | ||
| Dual Sport | Enduro R | 4-Stroke | 125cc; 390cc; 690cc | In Production |  690 Enduro R |
| Adventure | Adventure | 4-Stroke | 390cc, 890cc | In Production |  2022 390 Adventure |
| Super Adventure | LC8c: 4-Stroke; 75° V-twin | 1290cc | In Production | ||
| Rally Replica | 4-Stroke | 450cc | In Production | ||
| Sports Tourer | Super Duke GT | 4-Stroke | 1290cc | In Production | |
| SMT | 4-Stroke | 890cc | In Production | ||
| Supermoto | SMR | 4-Stroke | 450cc | In Production |  690 SMC R |
| SMC R | 4-Stroke | 125cc; 390cc; 690cc | In Production | ||
| Naked | Duke | LC4c: 4-Stroke; Single Cylinder LC8c: 4-Stroke; Parallel Twin |
250cc; 390cc; 990cc | In Production |  2018 Duke 790 |
| Super Duke | LC8: 4-Stroke; 75° V-twin | 1390cc | In Production | ||
| Brabus | 4-Stroke; 75° V-twin | 1400cc | In Production | ||
| Supersport | RC | 4-Stroke | 390cc | In Production |  RC 390 |
| RC 8C | 4-Stroke; Parallel Twin | 890cc | In Production | ||
| 990 RC R | Parallel-twin, 4-stroke | 990cc | In Production |
In the 1990s, AMA rule changes put the cheaper, simpler two-stroke machines at a disadvantage to four-stroke bikes in motocross competitions by limiting two-stroke displacement at 125 cc for the 250 cc class and 250 cc for the 450 cc class.[56] While other manufacturers have decided to discontinue their two-stroke models, KTM has continued with creating and improving their two-stroke engines and has consequently taken up a very high proportion of the two-stroke bike market.
New European emission laws have increased the pressure on two-stroke bikes, as their engines are less fuel efficient and produce more pollution than four-stroke engines. However, with newer advances in technology, two-strokes have begun to burn cleaner and pass stricter environmental standards. Starting in 2017, all newly registered motorcycles must conform with the Euro 4 regulations for emissions management. In May 2017, KTM unveiled a new two-stroke engine with direct fuel injection. By pressure-injecting an electronically controlled amount of fuel into the transfer port of the cylinder, the new TPI (transfer port injection) engines will be more fuel efficient and cleaner than classic carburetor two-stroke engines, albeit more complex and expensive. By 2018, 250 and 300 EXC TPI enduro models will be powered by the new engine.[57]

The first KTM street bike was the 1994 Duke 620.[58][59][60]
Standard/Naked – With the Duke and Superduke models, KTM currently offers naked bikes with 250, 390, 990 and 1390 cc displacement. The 125 (not available in the US), 250 and 390 models have a single-cylinder four-stroke LC4 motor. The 990 Duke use a new twin-parallel engine. The 1390 R Superduke model is equipped with a 75 degree V-twin four-stroke motor (LC8).[61]
The 200, 250 and 390 Duke models are currently produced by Bajaj Auto in Pune, India. The 250 is only available in Asia, with only the Duke 390 and Duke 200 being exported to European countries and North America.
Dual Sport – KTM currently produces the 390 Enduro R and 690 Enduro R Dual sport models which are basically road bikes suitable for off-road excursions. These bikes typically have lower seat heights and more comfort features than a "street legal" off-road bike.
Adventure touring – KTM currently produces the 390 Adventure, 890 Adventure R, and 1290 Super Adventure dual-sport adventure bikes in versions with different seat height, wheels and suspensions that endow the machines with a road (S), off-road (R – for rally) or touring (T) bias.[62] Not all versions are available on the US market.
The 1090 Adventure and 1290 Super Adventure bikes are powered by 75 degree V-twin four-stroke motors (LC8). The 790 Adventure is powered by the new LC8c parallel twin four-stroke motor. All 3 feature a slipper clutch, electronically controlled riding modes (sport, street and rain) with the 1290 and 790 featuring a TFT display and the 1090 featuring a twin (analog plus LCD) display.
Sport – KTM sport bikes currently offered in the supersport category include the RC 125 (not available in the US) and the RC 390. Both are street-legal versions of bikes that compete in street races. With the RC16, KTM has presented a 1000 cc sport bike that will race in the MotoGP class of the 2017 Road Racing World Championship Grand Prix.[63] Whether there will be a street-legal production version of the RC16 at a later point in time is yet unclear.
In Asia, KTM also markets RC 200 and RC 250 street bikes. KTM is also planning to introduced a new 150cc bike in its RC lineup in the Asian countries. This would be the KTC RC 150, that will powered by a 149cc, single-cylinder engine and 6-speed gearbox. This will be launched at a more affordable price, so everyone can opt for it.[64]
Sports Touring – The KTM sports tourer 1290 Superduke GT (Gran Turismo) is a version of the 1290 Superduke R naked bike that has been modified for more touring comfort with a longer and more robust frame, modified handlebar, larger fuel tank and modified 75 degree V-twin four-stroke LC8 motor. Like the 1290 Super Adventure, the 1290 Superduke GT features three electronically controlled riding modes.[65]
Supermoto – KTM was the first manufacturer to offer a competition-ready supermoto bike to the public. However, the company stopped supermoto production in 2016 to focus on stock 690 SMC R machines. For the 2019 Model year, the 690 SMC R model was completely renewed. The bike now has the latest version of the single cylinder LC4 power unit, introduced for the MY2016 Duke. The previous supermoto models included the 625 SMC and the race version 560 SMR. The 141 kg light 690 SMC R model has a 48 kW liquid-cooled one-cylinder four-stroke motor (LC4) and a hydraulically actuated APTC slipper clutch.[66]

The KTM X-Bow (pronounced cross-bow) is a series of lightweight, two-seater sports cars known as the X-Bow R, the X-Bow RR, the X-Bow GT and the X-BOW GT4.[67] The R and GT versions of the X-Bow are street-legal in Europe, North America, China and Australia. It uses an Audi engine and a carbon fibre chassis developed in cooperation with Italian racing car manufacturer Dallara, making it the world's first street-legal car with a full carbon fibre monocoque.
KTM retired from superbike production and competitions.[50] From 2008 to 2015, the company produced the 1190 RC8 superbike, a light, powerful homologated (street-legal) bike for superbike competitions with an LC8 motor and without any of the electronic driving aids that the otherwise comparable Superduke and Super Adventure models offer.
KTM has ceased production of 450SX, 450XC, 505SX and 525XC All-terrain vehicles
Since 2016,[68] KTM motorcycles have been designed by KISKA GmbH, a Salzburg-based design firm. KISKA also designed four versions of the X-Bow and is responsible for the overall branding for KTM and Husqvarna.
Under the Powerparts label, KTM sells tuning and styling parts for its street and off-road motorcycles and the X-Bow.[69] The Powerwear label offers race gear and equipment, clothing, accessories and merchandise articles.[70]
|
|
| Domestic manufacturers |
|
| Defunct companies |
|
| Components manufacturers |
|
| Related topics |
|

|
|
| Observation data Epoch J2000 Equinox J2000 |
|
|---|---|
| Constellation | Ursa Minor |
| Pronunciation | /pəˈlɛərɪs, -ˈlær-/; UK: /pəˈlɑːrɪs/[1] |
| α UMi A | |
| Right ascension | 02h 31m 49.09s[2] |
| Declination | +89° 15′ 50.8″[2] |
| Apparent magnitude (V) | 1.98[3] (1.86 – 2.13)[4] |
| α UMi B | |
| Right ascension | 02h 30m 41.63s[5] |
| Declination | +89° 15′ 38.1″[5] |
| Apparent magnitude (V) | 8.7[3] |
| Characteristics | |
| α UMi A | |
| Spectral type | F7Ib + F6V[6] |
| U−B color index | 0.38[3] |
| B−V color index | 0.60[3] |
| Variable type | Classical Cepheid[4] |
| α UMi B | |
| Spectral type | F3V[3] |
| U−B color index | 0.01[7] |
| B−V color index | 0.42[7] |
| Variable type | suspected[4] |
| Astrometry | |
| Radial velocity (Rv) | −17[8] km/s |
| Proper motion (μ) | RA: 44.48±0.11[2] mas/yr Dec.: −11.85±0.13[2] mas/yr |
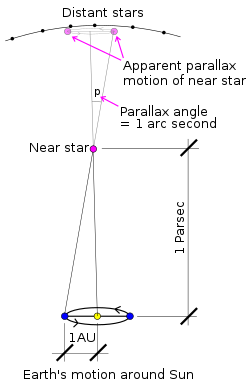
| Parallax (π) | 7.54±0.11 mas[2] |
| Distance | 446.5±1.1 ly (136.90±0.34 pc)[9] |
| Absolute magnitude (MV) | −3.6 (α UMi Aa)[3] 3.6 (α UMi Ab)[3] 3.1 (α UMi B)[3] |
| Position (relative to α UMi Aa) | |
| Component | α UMi Ab |
| Epoch of observation | 2005.5880 |
| Angular distance | 0.172″ |
| Position angle | 231.4° |
| Position (relative to α UMi Aa) | |
| Component | α UMi B |
| Epoch of observation | 2005.5880 |
| Angular distance | 18.217″ |
| Position angle | 230.540° |
| Orbit[9] | |
| Primary | α UMi Aa |
| Companion | α UMi Ab |
| Period (P) | 29.416±0.028 yr |
| Semi-major axis (a) | 0.12955±0.00205" (≥2.90±0.03 AU[10]) |
| Eccentricity (e) | 0.6354±0.0066 |
| Inclination (i) | 127.57±1.22° |
| Longitude of the node (Ω) | 201.28±1.18° |
| Periastron epoch (T) | 2016.831±0.044 |
| Argument of periastron (ω) (primary) |
304.54±0.84° |
| Semi-amplitude (K1) (primary) |
3.762±0.025 km/s |
| Details | |
| α UMi Aa | |
| Mass | 5.13±0.28[9] M☉ |
| Radius | 46.27±0.42[9] R☉ |
| Luminosity (bolometric) | 1,260[11] L☉ |
| Surface gravity (log g) | 2.2[12] cgs |
| Temperature | 6015[7] K |
| Metallicity | 112% solar[13] |
| Rotation | 119 days[6] |
| Rotational velocity (v sin i) | 14[6] km/s |
| Age | 45 - 67?[14][15] Myr |
| α UMi Ab | |
| Mass | 1.316[9] M☉ |
| Radius | 1.04[3] R☉ |
| Luminosity (bolometric) | 3[3] L☉ |
| Age | >500?[15] Myr |
| α UMi B | |
| Mass | 1.39[3] M☉ |
| Radius | 1.38[7] R☉ |
| Luminosity (bolometric) | 3.9[7] L☉ |
| Surface gravity (log g) | 4.3[7] cgs |
| Temperature | 6900[7] K |
| Rotational velocity (v sin i) | 110[7] km/s |
| Age | 1.5?[14][15] Gyr |
| Other designations | |
| Polaris, North Star, Cynosura, Alpha UMi, α UMi, ADS 1477, CCDM J02319+8915 | |
| α UMi A: 1 Ursae Minoris, BD+88°8, FK5 907, GC 2243, HD 8890, HIP 11767, HR 424, SAO 308 | |
| α UMi B: NSV 631, BD+88°7, GC 2226, SAO 305 | |
| Database references | |
| SIMBAD | α UMi A |
| α UMi B | |
Polaris is a star in the northern circumpolar constellation of Ursa Minor. It is designated α Ursae Minoris (Latinized to Alpha Ursae Minoris) and is commonly called the North Star. With an apparent magnitude that fluctuates around 1.98,[3] it is the brightest star in the constellation and is readily visible to the naked eye at night.[16] The position of the star lies less than 1° away from the north celestial pole, making it the current northern pole star. The stable position of the star in the Northern Sky makes it useful for navigation.[17]
Although appearing to the naked eye as a single point of light, Polaris is a triple star system, composed of the primary, a yellow supergiant designated Polaris Aa, in orbit with a smaller companion, Polaris Ab; the pair is almost certainly[14] in a wider orbit with Polaris B. The outer companion B was discovered in August 1779 by William Herschel, with the inner Aa/Ab pair only confirmed in the early 20th century.
As the closest Cepheid variable, Polaris Aa's distance is a foundational part of the cosmic distance ladder. The revised Hipparcos stellar parallax gives a distance to Polaris A of about 432 light-years (ly) (133 parsecs (pc)), while the successor mission Gaia gives a distance of 446.5 ly (136.9 pc) for Polaris B[9][a].

Polaris Aa is an evolved yellow supergiant of spectral type F7Ib with 5.4 solar masses (M☉). It is the first classical Cepheid to have a mass determined from its orbit. The two smaller companions are Polaris B, a 1.39 M☉ F3 main-sequence star orbiting at a distance of 2,400 astronomical units (AU),[18] and Polaris Ab (or P), a very close F6 main-sequence star with a mass of 1.26 M☉.[3] In January 2006, NASA released images, from the Hubble telescope, that showed the three members of the Polaris ternary system.[19][20]
Polaris B can be resolved with a modest telescope. William Herschel discovered the star in August 1779 using a reflecting telescope of his own, one of the best telescopes of the time.[21]
The variable radial velocity of Polaris A was reported by W. W. Campbell in 1899, which suggested this star is a binary system.[22] Since Polaris A is a known cepheid variable, J. H. Moore in 1927 demonstrated that the changes in velocity along the line of sight were due to a combination of the four-day pulsation period combined with a much longer orbital period and a large eccentricity of around 0.6.[23] Moore published preliminary orbital elements of the system in 1929, giving an orbital period of about 29.7 years with an eccentricity of 0.63. This period was confirmed by proper motion studies performed by B. P. Gerasimovič in 1939.[24]
As part of her doctoral thesis, in 1955 E. Roemer used radial velocity data to derive an orbital period of 30.46 y for the Polaris A system, with an eccentricity of 0.64.[25] K. W. Kamper in 1996 produced refined elements with a period of 29.59±0.02 years and an eccentricity of 0.608±0.005.[26] In 2019, a study by R. I. Anderson gave a period of 29.32±0.11 years with an eccentricity of 0.620±0.008.[10]
There were once thought to be two more widely separated components—Polaris C and Polaris D—but these have been shown not to be physically associated with the Polaris system.[18][27]

Polaris Aa, the supergiant primary component, is a low-amplitude population I classical Cepheid variable, although it was once thought to be a type II Cepheid due to its high galactic latitude. Cepheids constitute an important standard candle for determining distance, so Polaris, as the closest such star,[10] is heavily studied. The variability of Polaris had been suspected since 1852; this variation was confirmed by Ejnar Hertzsprung in 1911.[29]
The range of brightness of Polaris is given as 1.86–2.13,[4] but the amplitude has changed since discovery. Prior to 1963, the amplitude was over 0.1 magnitude and was very gradually decreasing. After 1966, it very rapidly decreased until it was less than 0.05 magnitude; since then, it has erratically varied near that range. It has been reported that the amplitude is now increasing again, a reversal not seen in any other Cepheid.[6]
The period, roughly 4 days, has also changed over time. It has steadily increased by around 4.5 seconds per year except for a hiatus in 1963–1965. This was originally thought to be due to secular redward evolution across the Cepheid instability strip, but it may be due to interference between the primary and the first-overtone pulsation modes.[20][30][31] Authors disagree on whether Polaris is a fundamental or first-overtone pulsator and on whether it is crossing the instability strip for the first time or not.[11][31][32]
The temperature of Polaris varies by only a small amount during its pulsations, but the amplitude of this variation is variable and unpredictable. The erratic changes of temperature and the amplitude of temperature changes during each cycle, from less than 50 K to at least 170 K, may be related to the orbit with Polaris Ab.[12]

Research reported in Science suggests that Polaris is 2.5 times brighter today than when Ptolemy observed it, changing from third to second magnitude.[33] Astronomer Edward Guinan considers this to be a remarkable change and is on record as saying that "if they are real, these changes are 100 times larger than [those] predicted by current theories of stellar evolution".
Torres 2023 published a broad historical compilation of radial velocity and photometric data. He concludes that the change in the Cepheid period has reversed and is now decreasing since roughly 2010. Torres notes that TESS data is of limited utility: as a survey telescope, TESS is optimized for dimmer stars than Polaris, so Polaris significantly over-saturates TESS's cameras. Determining an accurate total brightness for Polaris from TESS is extremely difficult, although it remains suitable for timing the period.[34]
Furthermore, apparent irregularities in Polaris Aa's behavior may coincide with the periastron passage of Ab, although imprecision in the data prevents a definitive conclusion.[34] At the Gaia distance, the Aa-Ab closest approach is 6.2 AU; the radius of the primary supergiant is 46 R☉, meaning that the periastron separation is about 29 times its radius. This implies tidal forcing upon Aa's upper atmosphere by Ab. Such binary tidal forcing is known from heartbeat stars, where eccentric periastron approaches cause rich multimode pulsation akin to an electrocardiogram.
Szabados 1992 suggests that, among Cepheids, "phase slips" similar to what happened to Polaris in the mid 1960s are associated with binary systems.[35]
In 2024, researchers led by Nancy Evans at the Harvard & Smithsonian published a study with fresh data on the inner binary using the interferometric CHARA Array. They improved the solution of the orbit: combining CHARA data with previous Hubble data, and in tandem with the Gaia distance of 446±1 light-years, they confirmed the Cepheid radius estimate of 46 R☉ and re-determined its mass at 5.13±0.28 M☉. The corresponding Polaris Ab mass is 1.316±0.028 M☉. Polaris remains overluminous compared to the best Cepheid evolution models, something also seen in V1334 Cygni. Polaris's rapid period change and pulsation amplitude variations are still peculiar compared to other Cepheids, but may be related to the first-overtone pulsations.[9]
Evans et al also tentatively succeeded in imaging features on the surface of Polaris Aa: large bright and dark patches appear in close-up images, changing over time. Follow up imaging campaigns are required to confirm this detection.[9] Polaris's age is difficult to model; current best estimates find the Cepheid to be much younger than the two main sequence components, seemingly enough to exclude a common origin, which would be quite unlikely for a triple star system.[14][15]
Torres 2023 and Evans et al 2024 both suggest that recent literature cautiously agree that Polaris is a first overtone pulsator.[34][9]



Because Polaris lies nearly in a direct line with the Earth's rotational axis above the North Pole, it stands almost motionless in the sky, and all the stars of the northern sky appear to rotate around it. It thus provides a nearly fixed point from which to draw measurements for celestial navigation and for astrometry. The elevation of the star above the horizon gives the approximate latitude of the observer.[16]
In 2018 Polaris was 0.66° (39.6 arcminutes) away from the pole of rotation (1.4 times the Moon disc) and so revolves around the pole in a small circle 1.3° in diameter. It will be closest to the pole (about 0.45 degree, or 27 arcminutes) soon after the year 2100.[37] Because it is so close to the celestial north pole, its right ascension is changing rapidly due to the precession of Earth's axis, going from 2.5h in AD 2000 to 6h in AD 2100. Twice in each sidereal day Polaris's azimuth is true north; the rest of the time it is displaced eastward or westward, and the bearing must be corrected using tables or a rule of thumb. The best approximation[36] is made using the leading edge of the "Big Dipper" asterism in the constellation Ursa Major. The leading edge (defined by the stars Dubhe and Merak) is referenced to a clock face, and the true azimuth of Polaris worked out for different latitudes.
The apparent motion of Polaris towards and, in the future, away from the celestial pole, is due to the precession of the equinoxes.[38] The celestial pole will move away from α UMi after the 21st century, passing close by Gamma Cephei by about the 41st century, moving towards Deneb by about the 91st century.[citation needed]
The celestial pole was close to Thuban around 2750 BCE,[38] and during classical antiquity it was slightly closer to Kochab (β UMi) than to Polaris, although still about 10° from either star.[39] It was about the same angular distance from β UMi as to α UMi by the end of late antiquity. The Greek navigator Pytheas in ca. 320 BC described the celestial pole as devoid of stars. However, as one of the brighter stars close to the celestial pole, Polaris was used for navigation at least from late antiquity, and described as ἀεί φανής (aei phanēs) "always visible" by Stobaeus (5th century), also termed Λύχνος (Lychnos) akin to a burner or lamp and would reasonably be described as stella polaris from about the High Middle Ages and onwards, both in Greek and Latin. On his first trans-Atlantic voyage in 1492, Christopher Columbus had to correct for the "circle described by the pole star about the pole".[40] In Shakespeare's play Julius Caesar, written around 1599, Caesar describes himself as being "as constant as the northern star", although in Caesar's time there was no constant northern star. Despite its relative brightness, it is not, as is popularly believed, the brightest star in the sky.[41]
Polaris was referenced in the classic Nathaniel Bowditch maritime navigation book American Practical Navigator (1802), where it is listed as one of the navigational stars.[42]

The modern name Polaris[43] is shortened from the Neo-Latin stella polaris ("polar star"), coined in the Renaissance when the star had approached the celestial pole to within a few degrees.[44][45]
Gemma Frisius, writing in 1547, referred to it as stella illa quae polaris dicitur ("that star which is called 'polar'"), placing it 3° 8' from the celestial pole.[44][45]
In 2016, the International Astronomical Union organized a Working Group on Star Names (WGSN)[46] to catalog and standardize proper names for stars. The WGSN's first bulletin of July 2016 included a table of the first two batches of names approved by the WGSN; which included Polaris for the star α Ursae Minoris Aa.[47]
In antiquity, Polaris was not yet the closest naked-eye star to the celestial pole, and the entire constellation of Ursa Minor was used for navigation rather than any single star. Polaris moved close enough to the pole to be the closest naked-eye star, even though still at a distance of several degrees, in the early medieval period, and numerous names referring to this characteristic as polar star have been in use since the medieval period. In Old English, it was known as scip-steorra ("ship-star").[citation needed]
In the "Old English rune poem", the T-rune is apparently associated with "a circumpolar constellation", or the planet Mars.[48]
In the Hindu Puranas, it became personified under the name Dhruva ("immovable, fixed").[49]
In the later medieval period, it became associated with the Marian title of Stella Maris "Star of the Sea" (so in Bartholomaeus Anglicus, c. 1270s),[50] due to an earlier transcription error.[51]
An older English name, attested since the 14th century, is lodestar "guiding star", cognate with the Old Norse leiðarstjarna, Middle High German leitsterne.[52]
The ancient name of the constellation Ursa Minor, Cynosura (from the Greek κυνόσουρα "the dog's tail"),[53] became associated with the pole star in particular by the early modern period. An explicit identification of Mary as stella maris with the polar star (Stella Polaris), as well as the use of Cynosura as a name of the star, is evident in the title Cynosura seu Mariana Stella Polaris (i.e. "Cynosure, or the Marian Polar Star"), a collection of Marian poetry published by Nicolaus Lucensis (Niccolo Barsotti de Lucca) in 1655. [citation needed]

Its name in traditional pre-Islamic Arab astronomy was al-Judayy الجدي ("the kid", in the sense of a juvenile goat ["le Chevreau"] in Description des Etoiles fixes),[54] and that name was used in medieval Islamic astronomy as well.[55][56] In those times, it was not yet as close to the north celestial pole as it is now, and used to rotate around the pole.[citation needed]
It was invoked as a symbol of steadfastness in poetry, as "steadfast star" by Spenser. Shakespeare's sonnet 116 is an example of the symbolism of the north star as a guiding principle: "[Love] is the star to every wandering bark / Whose worth's unknown, although his height be taken."[57]
In Julius Caesar, Shakespeare has Caesar explain his refusal to grant a pardon: "I am as constant as the northern star/Of whose true-fixed and resting quality/There is no fellow in the firmament./The skies are painted with unnumbered sparks,/They are all fire and every one doth shine,/But there's but one in all doth hold his place;/So in the world" (III, i, 65–71). Of course, Polaris will not "constantly" remain as the north star due to precession, but this is only noticeable over centuries.[citation needed]
In Inuit astronomy, Polaris is known as Nuutuittuq (syllabics: ᓅᑐᐃᑦᑐᖅ).[58]
In traditional Lakota star knowledge, Polaris is named "Wičháȟpi Owáŋžila". This translates to "The Star that Sits Still". This name comes from a Lakota story in which he married Tȟapȟúŋ Šá Wíŋ, "Red Cheeked Woman". However, she fell from the heavens, and in his grief Wičháȟpi Owáŋžila stared down from "waŋkátu" (the above land) forever.[59]
The Plains Cree call the star in Nehiyawewin: acâhkos êkâ kâ-âhcît "the star that does not move" (syllabics: ᐊᒑᐦᑯᐢ ᐁᑳ ᑳ ᐋᐦᒌᐟ).[60]
In Mi'kmawi'simk the star is named Tatapn.[61]
In the ancient Finnish worldview, the North Star has also been called taivaannapa and naulatähti ("the nailstar") because it seems to be attached to the firmament or even to act as a fastener for the sky when other stars orbit it. Since the starry sky seemed to rotate around it, the firmament is thought of as a wheel, with the star as the pivot on its axis. The names derived from it were sky pin and world pin.[citation needed]
Since Leavitt's discovery of the Cepheid variable period-luminosity relationship, and corresponding utility as a standard candle, the distance to Polaris has been highly sought-after by astronomers. It is the closest Cepheid to Earth, and thus key to calibrating the Cepheid standard candle; Cepheids form the base of the cosmic distance ladder by which to probe the cosmological nature of the universe.[62]
Distance measurement techniques depend on whether or not components A and B are a physical pair, that is, gravitationally bound. If they are, then their estimated distance can be presumed to be equal.[b] Gravitational binding of this pair is well supported by observations, and the presumption of common distance is widely adopted in historical and recent estimates.[64][65][66][26][67][62][14][9]
For most of the 20th century, available observation technologies remained inadequate to precisely measure absolute parallax.[68][62] Instead, the main technique was to use theoretical models of stellar evolution for both main sequence and giant stars, combined with spectroscopic and photometric data to estimate distances. Such modeling relies on theoretical assumptions and guesses, and contains much systematic error and statistical uncertainties in population data. Even by 2013, these techniques were still struggling to achieve even 10% precision in either main sequence[69] or Cepheid[14] modeling.
Further progress was thus limited until the advent of Hipparcos, the first instrument able to engage in all-sky absolute parallax astrometry.[68] Its first data release was in 1997.
| Published | Component | Distance | Source | Notes | |
|---|---|---|---|---|---|
| ly | pc | ||||
| 1966 | B | (359)[c] | (110)[c] | Fernie[64] | Photometry and modeling of B[c] |
| 1977 | B | (399)[d] | (122)[d] | Turner[65] | Photometry and modeling of B[d] |
| 1978 | A | 356* | 109* | Gauthier and Fernie[66] | Modeling extinction and Cepheid evolution of A |
| 1996 | B | 359* | 110* | Kamper[26] | Photometry and modeling of B, reproducing prior estimates |
| 1997 | A | 431±29 | 132±9 | Hipparcos[70] | All-sky/absolute[68] parallax observations, of the primary variable[e] |
| 2004-2013 | A, B | 307±13 | 94±4 | Turner/Turner et al | Cepheid evolution modeling[30], cluster kinematics and ZAMS fitting[30][67], photometry and modeling of B[67], spectral line ratios of A calibrated on yellow supergiants[62] |
| 329±10 | 101±3 | ||||
| 323±7 | 99±2 | ||||
| 2007[f] | A | 432±6 | 133±2 | Hipparcos[2][69] | All-sky/absolute parallax observations, revised analysis, of the primary variable[f] |
| 2008 | B | 357* | 109.5* | Usenko & Klochkova[7] | Photometry and modeling of B |
| 2014 | A | >385 | >118 | Neilson[71] | Cepheid evolution modeling, independent of any distance prior |
| 2018 | B | 521±20 | 160±6 | Hubble, Bond et al.[14] | Relative[68] parallax of the wide component referencing photometrically-calibrated background stars |
| 2018 | B | 445.3±1.7 | 136.6±0.5 | Gaia DR2[72] | All-sky/absolute[68] parallax observations, of the wide component[g] |
| 2020 | B | 446.5±1.1 | 136.9±0.3 | Gaia DR3[5][9] | All-sky/absolute parallax observations, of the wide component[h] |
| ^ * This estimate didn't state its uncertainty |
After the arrival of the Hipparcos data, the distance to Polaris and consequent analysis of its Cepheid variation was controversial. The Hipparcos distance for Polaris was broadly but not universally adopted.[20] Immediately, the Hipparcos data for the nearest few hundred Cepheids appeared to clarify Cepheid models and to clear up then-tension in higher rungs of the distance ladder.[70] However alternatives remained; particularly by Turner et al, who published several papers between 2004 and 2013.[62]
In 2018, Bond et al[14] used the Hubble Space Telescope to provide an alternate direct measurement of Polaris's parallax; they summarize the back-and-forth:
However, Turner et al. (2013, hereafter TKUG13)[62] argue that the parallax of Polaris is considerably larger, 10.10 ± 0.20 mas (d = 99±2 pc). The evidence cited by TKUG13 for this “short” distance includes (1) a photometric parallax for Polaris B based on measured photometry, spectral classification, and main-sequence fitting; (2) a claim that there is a sparse cluster of A-, F-, and G-type stars within 3° of Polaris, with proper motions and radial velocities similar to that of the Cepheid, for which the Hipparcos parallaxes combined with main-sequence fitting give a distance of 99 pc; and (3) a determination of the absolute visual magnitude of Polaris based on line ratios in high-resolution spectra, calibrated against supergiants with well-established luminosities. [...]
[...]
In a critique of the TKUG13 paper, van Leeuwen (2013, hereafter L13)[69] defended the Hipparcos parallax by presenting details of the solution, concluding that “the Hipparcos data cannot in any way support” the large parallax advocated by TKUG13. Using Hipparcos data, L13 also questioned the reality of the sparse cluster proposed by TKUG13, presenting evidence against it both from the color versus absolute-magnitude diagram for stars within 3° of Polaris, and their non-clustered distribution of proper motions. Lastly, L13 examined the absolute magnitudes of nearly 400 stars of spectral type F3 V in the Hipparcos catalog with parallax errors of less than 10%, and showed that the absolute magnitude of Polaris B would fall well within the observed MV distribution for F3 V stars, based on either the Hipparcos parallax of A or the larger parallax proposed by TKUG13. Thus, he concluded that the photometric parallax of B does not give a useful discriminant.
— [14]
Bond et al go on to find a trigonometric parallax (independent of Hipparcos) that implies a distance further-still than the "long" Hipparcos distance, well outside the plausible range of the "short" distance estimates.
The next major step in high precision parallax measurements comes from Gaia, a space astrometry mission launched in 2013 and intended to measure stellar parallax to within 25 microarcseconds (μas).[74] Although it was originally planned to limit Gaia's observations to stars fainter than magnitude 5.7, tests carried out during the commissioning phase indicated that Gaia could autonomously identify stars as bright as magnitude 3. When Gaia entered regular scientific operations in July 2014, it was configured to routinely process stars in the magnitude range 3 – 20.[75] Beyond that limit, special procedures are used to download raw scanning data for the remaining 230 stars brighter than magnitude 3; methods to reduce and analyse these data are being developed; and it is expected that there will be "complete sky coverage at the bright end" with standard errors of "a few dozen μas".[76]
Gaia DR2 does not include a parallax for Polaris A, but a distance inferred from Polaris B is 136.6±0.5 pc (445.5±1.7 ly),[72] somewhat further than most previous estimates and (in principle) considerably more accurate. There are known to be considerable systematic uncertainties in DR2.[77]
Gaia DR3 significantly improved both the statistical and systematic uncertainties, although the latter remain numerous and on the order of 10–60 μas[63]; the new estimate is 136.9±0.3 pc (446.5±1.1 ly) using the baseline parallax zeropoint correction.[5][9][h]
Gaia DR4 (expected December 2026) will further improve the statistical and systematic uncertainties in general, and the data pipelines for variable and multiple stars in particular.[78] Multistar orbital solutions will become available, greatly aiding the study of Cepheids and Polaris, and in particular, may enable solving the outer AB orbit.[9]
Polaris is depicted in the flag and coat of arms of the Canadian Inuit territory of Nunavut,[79] the flag of the U.S. states of Alaska and Minnesota,[80] and the flag of the U.S. city of Duluth, Minnesota.[81][82]





![Flag of the Pan-American Exposition (1901)[83]](http://upload.wikimedia.org/wikipedia/commons/thumb/b/b6/Pan_American_Exposition_Flag.svg/120px-Pan_American_Exposition_Flag.svg.png)
![Sledge flag used by Francis Leopold McClintock in the Arctic (1852–1854)[84]](http://upload.wikimedia.org/wikipedia/commons/thumb/b/b1/Francis_Leopold_McClintock%27s_sledge_flag_%281852%E2%80%931854%29.svg/120px-Francis_Leopold_McClintock%27s_sledge_flag_%281852%E2%80%931854%29.svg.png)



![Coat of arms of Utsjoki[citation needed]](http://upload.wikimedia.org/wikipedia/commons/thumb/e/e6/Utsjoki.vaakuna.svg/120px-Utsjoki.vaakuna.svg.png)



![Polaris, its surrounding integrated flux nebula, and NGC188[dubious – discuss]](http://upload.wikimedia.org/wikipedia/commons/thumb/1/10/Integrated_Flux_Nebula_Surrounding_Polaris_-_Kush_Chandaria.jpg/120px-Integrated_Flux_Nebula_Surrounding_Polaris_-_Kush_Chandaria.jpg)
Around 4800 years ago Thuban ( α Draconis) lay a mere 0°.1 from the pole. Deneb (
α Cygni) will be the brightest star near the pole in about 8000 years' time, at a distance of 7°.5.
cite book: ISBN / Date incompatibility (help)
|
|||||||||||||
| Stars |
|
||||||||||||
|
|||||||||||||
| Galaxies |
|
||||||||||||
|
|||||||||||||
|
|
|||||||||||||
|
Authority control databases
|
|
|---|---|
| International |
|
| National |
|
| Other |
|




Arabian Nights Tours Camp in Abu Dhabi, UAE, offers an immersive desert adventure experience. Located in the heart of the Arabian desert, the camp provides guests with a traditional Bedouin-style setting, complete with comfortable tents and authentic decor. Visitors can enjoy a range of activities, including dune bashing, camel rides, and sandboarding. The camp also features cultural entertainment such as belly dancing, henna painting, and traditional music. Guests are treated to a sumptuous buffet of Arabic cuisine under the stars, making for a memorable and picturesque desert experience. Arabian Nights Tours Camp combines adventure, culture, and relaxation in a stunning desert landscape.
Yes, Buggy Dubai is completely safe when operated by licensed professionals like Dune Buggy Rentals Dubai. We provide certified guides, safety briefings, helmets, and well-maintained vehicles with full insurance coverage. Safety is our top priority.
Buggy Dubai refers to exhilarating off-road dune buggy experiences in Dubai's Arabian Desert. It involves driving powerful vehicles like Polaris RZR and Can-Am Maverick across golden sand dunes, offering tourists and adventure seekers an unforgettable desert adventure.
Buggy Dubai prices start from AED 600 for a 2-seater Polaris RZR 1000cc, AED 800 for a 4-seater Polaris, and AED 999 for a 2-seater Can-Am Maverick X3. All packages include guided tours, unlimited mineral water, and safety equipment.






