

|
|
| Observation data Epoch J2000 Equinox J2000 |
|
|---|---|
| Constellation | Ursa Minor |
| Pronunciation | /pəˈlɛərɪs, -ˈlær-/; UK: /pəˈlɑːrɪs/[1] |
| α UMi A | |
| Right ascension | 02h 31m 49.09s[2] |
| Declination | +89° 15′ 50.8″[2] |
| Apparent magnitude (V) | 1.98[3] (1.86 – 2.13)[4] |
| α UMi B | |
| Right ascension | 02h 30m 41.63s[5] |
| Declination | +89° 15′ 38.1″[5] |
| Apparent magnitude (V) | 8.7[3] |
| Characteristics | |
| α UMi A | |
| Spectral type | F7Ib + F6V[6] |
| U−B color index | 0.38[3] |
| B−V color index | 0.60[3] |
| Variable type | Classical Cepheid[4] |
| α UMi B | |
| Spectral type | F3V[3] |
| U−B color index | 0.01[7] |
| B−V color index | 0.42[7] |
| Variable type | suspected[4] |
| Astrometry | |
| Radial velocity (Rv) | −17[8] km/s |
| Proper motion (μ) | RA: 44.48±0.11[2] mas/yr Dec.: −11.85±0.13[2] mas/yr |
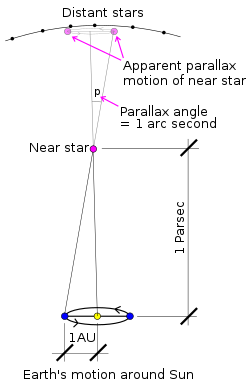
| Parallax (π) | 7.54±0.11 mas[2] |
| Distance | 446.5±1.1 ly (136.90±0.34 pc)[9] |
| Absolute magnitude (MV) | −3.6 (α UMi Aa)[3] 3.6 (α UMi Ab)[3] 3.1 (α UMi B)[3] |
| Position (relative to α UMi Aa) | |
| Component | α UMi Ab |
| Epoch of observation | 2005.5880 |
| Angular distance | 0.172″ |
| Position angle | 231.4° |
| Position (relative to α UMi Aa) | |
| Component | α UMi B |
| Epoch of observation | 2005.5880 |
| Angular distance | 18.217″ |
| Position angle | 230.540° |
| Orbit[9] | |
| Primary | α UMi Aa |
| Companion | α UMi Ab |
| Period (P) | 29.416±0.028 yr |
| Semi-major axis (a) | 0.12955±0.00205" (≥2.90±0.03 AU[10]) |
| Eccentricity (e) | 0.6354±0.0066 |
| Inclination (i) | 127.57±1.22° |
| Longitude of the node (Ω) | 201.28±1.18° |
| Periastron epoch (T) | 2016.831±0.044 |
| Argument of periastron (ω) (primary) |
304.54±0.84° |
| Semi-amplitude (K1) (primary) |
3.762±0.025 km/s |
| Details | |
| α UMi Aa | |
| Mass | 5.13±0.28[9] M☉ |
| Radius | 46.27±0.42[9] R☉ |
| Luminosity (bolometric) | 1,260[11] L☉ |
| Surface gravity (log g) | 2.2[12] cgs |
| Temperature | 6015[7] K |
| Metallicity | 112% solar[13] |
| Rotation | 119 days[6] |
| Rotational velocity (v sin i) | 14[6] km/s |
| Age | 45 - 67?[14][15] Myr |
| α UMi Ab | |
| Mass | 1.316[9] M☉ |
| Radius | 1.04[3] R☉ |
| Luminosity (bolometric) | 3[3] L☉ |
| Age | >500?[15] Myr |
| α UMi B | |
| Mass | 1.39[3] M☉ |
| Radius | 1.38[7] R☉ |
| Luminosity (bolometric) | 3.9[7] L☉ |
| Surface gravity (log g) | 4.3[7] cgs |
| Temperature | 6900[7] K |
| Rotational velocity (v sin i) | 110[7] km/s |
| Age | 1.5?[14][15] Gyr |
| Other designations | |
| Polaris, North Star, Cynosura, Alpha UMi, α UMi, ADS 1477, CCDM J02319+8915 | |
| α UMi A: 1 Ursae Minoris, BD+88°8, FK5 907, GC 2243, HD 8890, HIP 11767, HR 424, SAO 308 | |
| α UMi B: NSV 631, BD+88°7, GC 2226, SAO 305 | |
| Database references | |
| SIMBAD | α UMi A |
| α UMi B | |
Polaris is a star in the northern circumpolar constellation of Ursa Minor. It is designated α Ursae Minoris (Latinized to Alpha Ursae Minoris) and is commonly called the North Star. With an apparent magnitude that fluctuates around 1.98,[3] it is the brightest star in the constellation and is readily visible to the naked eye at night.[16] The position of the star lies less than 1° away from the north celestial pole, making it the current northern pole star. The stable position of the star in the Northern Sky makes it useful for navigation.[17]
Although appearing to the naked eye as a single point of light, Polaris is a triple star system, composed of the primary, a yellow supergiant designated Polaris Aa, in orbit with a smaller companion, Polaris Ab; the pair is almost certainly[14] in a wider orbit with Polaris B. The outer companion B was discovered in August 1779 by William Herschel, with the inner Aa/Ab pair only confirmed in the early 20th century.
As the closest Cepheid variable, Polaris Aa's distance is a foundational part of the cosmic distance ladder. The revised Hipparcos stellar parallax gives a distance to Polaris A of about 432 light-years (ly) (133 parsecs (pc)), while the successor mission Gaia gives a distance of 446.5 ly (136.9 pc) for Polaris B[9][a].

Polaris Aa is an evolved yellow supergiant of spectral type F7Ib with 5.4 solar masses (M☉). It is the first classical Cepheid to have a mass determined from its orbit. The two smaller companions are Polaris B, a 1.39 M☉ F3 main-sequence star orbiting at a distance of 2,400 astronomical units (AU),[18] and Polaris Ab (or P), a very close F6 main-sequence star with a mass of 1.26 M☉.[3] In January 2006, NASA released images, from the Hubble telescope, that showed the three members of the Polaris ternary system.[19][20]
Polaris B can be resolved with a modest telescope. William Herschel discovered the star in August 1779 using a reflecting telescope of his own, one of the best telescopes of the time.[21]
The variable radial velocity of Polaris A was reported by W. W. Campbell in 1899, which suggested this star is a binary system.[22] Since Polaris A is a known cepheid variable, J. H. Moore in 1927 demonstrated that the changes in velocity along the line of sight were due to a combination of the four-day pulsation period combined with a much longer orbital period and a large eccentricity of around 0.6.[23] Moore published preliminary orbital elements of the system in 1929, giving an orbital period of about 29.7 years with an eccentricity of 0.63. This period was confirmed by proper motion studies performed by B. P. Gerasimovič in 1939.[24]
As part of her doctoral thesis, in 1955 E. Roemer used radial velocity data to derive an orbital period of 30.46 y for the Polaris A system, with an eccentricity of 0.64.[25] K. W. Kamper in 1996 produced refined elements with a period of 29.59±0.02 years and an eccentricity of 0.608±0.005.[26] In 2019, a study by R. I. Anderson gave a period of 29.32±0.11 years with an eccentricity of 0.620±0.008.[10]
There were once thought to be two more widely separated components—Polaris C and Polaris D—but these have been shown not to be physically associated with the Polaris system.[18][27]

Polaris Aa, the supergiant primary component, is a low-amplitude population I classical Cepheid variable, although it was once thought to be a type II Cepheid due to its high galactic latitude. Cepheids constitute an important standard candle for determining distance, so Polaris, as the closest such star,[10] is heavily studied. The variability of Polaris had been suspected since 1852; this variation was confirmed by Ejnar Hertzsprung in 1911.[29]
The range of brightness of Polaris is given as 1.86–2.13,[4] but the amplitude has changed since discovery. Prior to 1963, the amplitude was over 0.1 magnitude and was very gradually decreasing. After 1966, it very rapidly decreased until it was less than 0.05 magnitude; since then, it has erratically varied near that range. It has been reported that the amplitude is now increasing again, a reversal not seen in any other Cepheid.[6]
The period, roughly 4 days, has also changed over time. It has steadily increased by around 4.5 seconds per year except for a hiatus in 1963–1965. This was originally thought to be due to secular redward evolution across the Cepheid instability strip, but it may be due to interference between the primary and the first-overtone pulsation modes.[20][30][31] Authors disagree on whether Polaris is a fundamental or first-overtone pulsator and on whether it is crossing the instability strip for the first time or not.[11][31][32]
The temperature of Polaris varies by only a small amount during its pulsations, but the amplitude of this variation is variable and unpredictable. The erratic changes of temperature and the amplitude of temperature changes during each cycle, from less than 50 K to at least 170 K, may be related to the orbit with Polaris Ab.[12]

Research reported in Science suggests that Polaris is 2.5 times brighter today than when Ptolemy observed it, changing from third to second magnitude.[33] Astronomer Edward Guinan considers this to be a remarkable change and is on record as saying that "if they are real, these changes are 100 times larger than [those] predicted by current theories of stellar evolution".
Torres 2023 published a broad historical compilation of radial velocity and photometric data. He concludes that the change in the Cepheid period has reversed and is now decreasing since roughly 2010. Torres notes that TESS data is of limited utility: as a survey telescope, TESS is optimized for dimmer stars than Polaris, so Polaris significantly over-saturates TESS's cameras. Determining an accurate total brightness for Polaris from TESS is extremely difficult, although it remains suitable for timing the period.[34]
Furthermore, apparent irregularities in Polaris Aa's behavior may coincide with the periastron passage of Ab, although imprecision in the data prevents a definitive conclusion.[34] At the Gaia distance, the Aa-Ab closest approach is 6.2 AU; the radius of the primary supergiant is 46 R☉, meaning that the periastron separation is about 29 times its radius. This implies tidal forcing upon Aa's upper atmosphere by Ab. Such binary tidal forcing is known from heartbeat stars, where eccentric periastron approaches cause rich multimode pulsation akin to an electrocardiogram.
Szabados 1992 suggests that, among Cepheids, "phase slips" similar to what happened to Polaris in the mid 1960s are associated with binary systems.[35]
In 2024, researchers led by Nancy Evans at the Harvard & Smithsonian published a study with fresh data on the inner binary using the interferometric CHARA Array. They improved the solution of the orbit: combining CHARA data with previous Hubble data, and in tandem with the Gaia distance of 446±1 light-years, they confirmed the Cepheid radius estimate of 46 R☉ and re-determined its mass at 5.13±0.28 M☉. The corresponding Polaris Ab mass is 1.316±0.028 M☉. Polaris remains overluminous compared to the best Cepheid evolution models, something also seen in V1334 Cygni. Polaris's rapid period change and pulsation amplitude variations are still peculiar compared to other Cepheids, but may be related to the first-overtone pulsations.[9]
Evans et al also tentatively succeeded in imaging features on the surface of Polaris Aa: large bright and dark patches appear in close-up images, changing over time. Follow up imaging campaigns are required to confirm this detection.[9] Polaris's age is difficult to model; current best estimates find the Cepheid to be much younger than the two main sequence components, seemingly enough to exclude a common origin, which would be quite unlikely for a triple star system.[14][15]
Torres 2023 and Evans et al 2024 both suggest that recent literature cautiously agree that Polaris is a first overtone pulsator.[34][9]



Because Polaris lies nearly in a direct line with the Earth's rotational axis above the North Pole, it stands almost motionless in the sky, and all the stars of the northern sky appear to rotate around it. It thus provides a nearly fixed point from which to draw measurements for celestial navigation and for astrometry. The elevation of the star above the horizon gives the approximate latitude of the observer.[16]
In 2018 Polaris was 0.66° (39.6 arcminutes) away from the pole of rotation (1.4 times the Moon disc) and so revolves around the pole in a small circle 1.3° in diameter. It will be closest to the pole (about 0.45 degree, or 27 arcminutes) soon after the year 2100.[37] Because it is so close to the celestial north pole, its right ascension is changing rapidly due to the precession of Earth's axis, going from 2.5h in AD 2000 to 6h in AD 2100. Twice in each sidereal day Polaris's azimuth is true north; the rest of the time it is displaced eastward or westward, and the bearing must be corrected using tables or a rule of thumb. The best approximation[36] is made using the leading edge of the "Big Dipper" asterism in the constellation Ursa Major. The leading edge (defined by the stars Dubhe and Merak) is referenced to a clock face, and the true azimuth of Polaris worked out for different latitudes.
The apparent motion of Polaris towards and, in the future, away from the celestial pole, is due to the precession of the equinoxes.[38] The celestial pole will move away from α UMi after the 21st century, passing close by Gamma Cephei by about the 41st century, moving towards Deneb by about the 91st century.[citation needed]
The celestial pole was close to Thuban around 2750 BCE,[38] and during classical antiquity it was slightly closer to Kochab (β UMi) than to Polaris, although still about 10° from either star.[39] It was about the same angular distance from β UMi as to α UMi by the end of late antiquity. The Greek navigator Pytheas in ca. 320 BC described the celestial pole as devoid of stars. However, as one of the brighter stars close to the celestial pole, Polaris was used for navigation at least from late antiquity, and described as ἀεί φανής (aei phanēs) "always visible" by Stobaeus (5th century), also termed Λύχνος (Lychnos) akin to a burner or lamp and would reasonably be described as stella polaris from about the High Middle Ages and onwards, both in Greek and Latin. On his first trans-Atlantic voyage in 1492, Christopher Columbus had to correct for the "circle described by the pole star about the pole".[40] In Shakespeare's play Julius Caesar, written around 1599, Caesar describes himself as being "as constant as the northern star", although in Caesar's time there was no constant northern star. Despite its relative brightness, it is not, as is popularly believed, the brightest star in the sky.[41]
Polaris was referenced in the classic Nathaniel Bowditch maritime navigation book American Practical Navigator (1802), where it is listed as one of the navigational stars.[42]

The modern name Polaris[43] is shortened from the Neo-Latin stella polaris ("polar star"), coined in the Renaissance when the star had approached the celestial pole to within a few degrees.[44][45]
Gemma Frisius, writing in 1547, referred to it as stella illa quae polaris dicitur ("that star which is called 'polar'"), placing it 3° 8' from the celestial pole.[44][45]
In 2016, the International Astronomical Union organized a Working Group on Star Names (WGSN)[46] to catalog and standardize proper names for stars. The WGSN's first bulletin of July 2016 included a table of the first two batches of names approved by the WGSN; which included Polaris for the star α Ursae Minoris Aa.[47]
In antiquity, Polaris was not yet the closest naked-eye star to the celestial pole, and the entire constellation of Ursa Minor was used for navigation rather than any single star. Polaris moved close enough to the pole to be the closest naked-eye star, even though still at a distance of several degrees, in the early medieval period, and numerous names referring to this characteristic as polar star have been in use since the medieval period. In Old English, it was known as scip-steorra ("ship-star").[citation needed]
In the "Old English rune poem", the T-rune is apparently associated with "a circumpolar constellation", or the planet Mars.[48]
In the Hindu Puranas, it became personified under the name Dhruva ("immovable, fixed").[49]
In the later medieval period, it became associated with the Marian title of Stella Maris "Star of the Sea" (so in Bartholomaeus Anglicus, c. 1270s),[50] due to an earlier transcription error.[51]
An older English name, attested since the 14th century, is lodestar "guiding star", cognate with the Old Norse leiðarstjarna, Middle High German leitsterne.[52]
The ancient name of the constellation Ursa Minor, Cynosura (from the Greek κυνόσουρα "the dog's tail"),[53] became associated with the pole star in particular by the early modern period. An explicit identification of Mary as stella maris with the polar star (Stella Polaris), as well as the use of Cynosura as a name of the star, is evident in the title Cynosura seu Mariana Stella Polaris (i.e. "Cynosure, or the Marian Polar Star"), a collection of Marian poetry published by Nicolaus Lucensis (Niccolo Barsotti de Lucca) in 1655. [citation needed]

Its name in traditional pre-Islamic Arab astronomy was al-Judayy الجدي ("the kid", in the sense of a juvenile goat ["le Chevreau"] in Description des Etoiles fixes),[54] and that name was used in medieval Islamic astronomy as well.[55][56] In those times, it was not yet as close to the north celestial pole as it is now, and used to rotate around the pole.[citation needed]
It was invoked as a symbol of steadfastness in poetry, as "steadfast star" by Spenser. Shakespeare's sonnet 116 is an example of the symbolism of the north star as a guiding principle: "[Love] is the star to every wandering bark / Whose worth's unknown, although his height be taken."[57]
In Julius Caesar, Shakespeare has Caesar explain his refusal to grant a pardon: "I am as constant as the northern star/Of whose true-fixed and resting quality/There is no fellow in the firmament./The skies are painted with unnumbered sparks,/They are all fire and every one doth shine,/But there's but one in all doth hold his place;/So in the world" (III, i, 65–71). Of course, Polaris will not "constantly" remain as the north star due to precession, but this is only noticeable over centuries.[citation needed]
In Inuit astronomy, Polaris is known as Nuutuittuq (syllabics: ᓅᑐᐃᑦᑐᖅ).[58]
In traditional Lakota star knowledge, Polaris is named "Wičháȟpi Owáŋžila". This translates to "The Star that Sits Still". This name comes from a Lakota story in which he married Tȟapȟúŋ Šá Wíŋ, "Red Cheeked Woman". However, she fell from the heavens, and in his grief Wičháȟpi Owáŋžila stared down from "waŋkátu" (the above land) forever.[59]
The Plains Cree call the star in Nehiyawewin: acâhkos êkâ kâ-âhcît "the star that does not move" (syllabics: ᐊᒑᐦᑯᐢ ᐁᑳ ᑳ ᐋᐦᒌᐟ).[60]
In Mi'kmawi'simk the star is named Tatapn.[61]
In the ancient Finnish worldview, the North Star has also been called taivaannapa and naulatähti ("the nailstar") because it seems to be attached to the firmament or even to act as a fastener for the sky when other stars orbit it. Since the starry sky seemed to rotate around it, the firmament is thought of as a wheel, with the star as the pivot on its axis. The names derived from it were sky pin and world pin.[citation needed]
Since Leavitt's discovery of the Cepheid variable period-luminosity relationship, and corresponding utility as a standard candle, the distance to Polaris has been highly sought-after by astronomers. It is the closest Cepheid to Earth, and thus key to calibrating the Cepheid standard candle; Cepheids form the base of the cosmic distance ladder by which to probe the cosmological nature of the universe.[62]
Distance measurement techniques depend on whether or not components A and B are a physical pair, that is, gravitationally bound. If they are, then their estimated distance can be presumed to be equal.[b] Gravitational binding of this pair is well supported by observations, and the presumption of common distance is widely adopted in historical and recent estimates.[64][65][66][26][67][62][14][9]
For most of the 20th century, available observation technologies remained inadequate to precisely measure absolute parallax.[68][62] Instead, the main technique was to use theoretical models of stellar evolution for both main sequence and giant stars, combined with spectroscopic and photometric data to estimate distances. Such modeling relies on theoretical assumptions and guesses, and contains much systematic error and statistical uncertainties in population data. Even by 2013, these techniques were still struggling to achieve even 10% precision in either main sequence[69] or Cepheid[14] modeling.
Further progress was thus limited until the advent of Hipparcos, the first instrument able to engage in all-sky absolute parallax astrometry.[68] Its first data release was in 1997.
| Published | Component | Distance | Source | Notes | |
|---|---|---|---|---|---|
| ly | pc | ||||
| 1966 | B | (359)[c] | (110)[c] | Fernie[64] | Photometry and modeling of B[c] |
| 1977 | B | (399)[d] | (122)[d] | Turner[65] | Photometry and modeling of B[d] |
| 1978 | A | 356* | 109* | Gauthier and Fernie[66] | Modeling extinction and Cepheid evolution of A |
| 1996 | B | 359* | 110* | Kamper[26] | Photometry and modeling of B, reproducing prior estimates |
| 1997 | A | 431±29 | 132±9 | Hipparcos[70] | All-sky/absolute[68] parallax observations, of the primary variable[e] |
| 2004-2013 | A, B | 307±13 | 94±4 | Turner/Turner et al | Cepheid evolution modeling[30], cluster kinematics and ZAMS fitting[30][67], photometry and modeling of B[67], spectral line ratios of A calibrated on yellow supergiants[62] |
| 329±10 | 101±3 | ||||
| 323±7 | 99±2 | ||||
| 2007[f] | A | 432±6 | 133±2 | Hipparcos[2][69] | All-sky/absolute parallax observations, revised analysis, of the primary variable[f] |
| 2008 | B | 357* | 109.5* | Usenko & Klochkova[7] | Photometry and modeling of B |
| 2014 | A | >385 | >118 | Neilson[71] | Cepheid evolution modeling, independent of any distance prior |
| 2018 | B | 521±20 | 160±6 | Hubble, Bond et al.[14] | Relative[68] parallax of the wide component referencing photometrically-calibrated background stars |
| 2018 | B | 445.3±1.7 | 136.6±0.5 | Gaia DR2[72] | All-sky/absolute[68] parallax observations, of the wide component[g] |
| 2020 | B | 446.5±1.1 | 136.9±0.3 | Gaia DR3[5][9] | All-sky/absolute parallax observations, of the wide component[h] |
| ^ * This estimate didn't state its uncertainty |
After the arrival of the Hipparcos data, the distance to Polaris and consequent analysis of its Cepheid variation was controversial. The Hipparcos distance for Polaris was broadly but not universally adopted.[20] Immediately, the Hipparcos data for the nearest few hundred Cepheids appeared to clarify Cepheid models and to clear up then-tension in higher rungs of the distance ladder.[70] However alternatives remained; particularly by Turner et al, who published several papers between 2004 and 2013.[62]
In 2018, Bond et al[14] used the Hubble Space Telescope to provide an alternate direct measurement of Polaris's parallax; they summarize the back-and-forth:
However, Turner et al. (2013, hereafter TKUG13)[62] argue that the parallax of Polaris is considerably larger, 10.10 ± 0.20 mas (d = 99±2 pc). The evidence cited by TKUG13 for this “short” distance includes (1) a photometric parallax for Polaris B based on measured photometry, spectral classification, and main-sequence fitting; (2) a claim that there is a sparse cluster of A-, F-, and G-type stars within 3° of Polaris, with proper motions and radial velocities similar to that of the Cepheid, for which the Hipparcos parallaxes combined with main-sequence fitting give a distance of 99 pc; and (3) a determination of the absolute visual magnitude of Polaris based on line ratios in high-resolution spectra, calibrated against supergiants with well-established luminosities. [...]
[...]
In a critique of the TKUG13 paper, van Leeuwen (2013, hereafter L13)[69] defended the Hipparcos parallax by presenting details of the solution, concluding that “the Hipparcos data cannot in any way support” the large parallax advocated by TKUG13. Using Hipparcos data, L13 also questioned the reality of the sparse cluster proposed by TKUG13, presenting evidence against it both from the color versus absolute-magnitude diagram for stars within 3° of Polaris, and their non-clustered distribution of proper motions. Lastly, L13 examined the absolute magnitudes of nearly 400 stars of spectral type F3 V in the Hipparcos catalog with parallax errors of less than 10%, and showed that the absolute magnitude of Polaris B would fall well within the observed MV distribution for F3 V stars, based on either the Hipparcos parallax of A or the larger parallax proposed by TKUG13. Thus, he concluded that the photometric parallax of B does not give a useful discriminant.
— [14]
Bond et al go on to find a trigonometric parallax (independent of Hipparcos) that implies a distance further-still than the "long" Hipparcos distance, well outside the plausible range of the "short" distance estimates.
The next major step in high precision parallax measurements comes from Gaia, a space astrometry mission launched in 2013 and intended to measure stellar parallax to within 25 microarcseconds (μas).[74] Although it was originally planned to limit Gaia's observations to stars fainter than magnitude 5.7, tests carried out during the commissioning phase indicated that Gaia could autonomously identify stars as bright as magnitude 3. When Gaia entered regular scientific operations in July 2014, it was configured to routinely process stars in the magnitude range 3 – 20.[75] Beyond that limit, special procedures are used to download raw scanning data for the remaining 230 stars brighter than magnitude 3; methods to reduce and analyse these data are being developed; and it is expected that there will be "complete sky coverage at the bright end" with standard errors of "a few dozen μas".[76]
Gaia DR2 does not include a parallax for Polaris A, but a distance inferred from Polaris B is 136.6±0.5 pc (445.5±1.7 ly),[72] somewhat further than most previous estimates and (in principle) considerably more accurate. There are known to be considerable systematic uncertainties in DR2.[77]
Gaia DR3 significantly improved both the statistical and systematic uncertainties, although the latter remain numerous and on the order of 10–60 μas[63]; the new estimate is 136.9±0.3 pc (446.5±1.1 ly) using the baseline parallax zeropoint correction.[5][9][h]
Gaia DR4 (expected December 2026) will further improve the statistical and systematic uncertainties in general, and the data pipelines for variable and multiple stars in particular.[78] Multistar orbital solutions will become available, greatly aiding the study of Cepheids and Polaris, and in particular, may enable solving the outer AB orbit.[9]
Polaris is depicted in the flag and coat of arms of the Canadian Inuit territory of Nunavut,[79] the flag of the U.S. states of Alaska and Minnesota,[80] and the flag of the U.S. city of Duluth, Minnesota.[81][82]





![Flag of the Pan-American Exposition (1901)[83]](http://upload.wikimedia.org/wikipedia/commons/thumb/b/b6/Pan_American_Exposition_Flag.svg/120px-Pan_American_Exposition_Flag.svg.png)
![Sledge flag used by Francis Leopold McClintock in the Arctic (1852–1854)[84]](http://upload.wikimedia.org/wikipedia/commons/thumb/b/b1/Francis_Leopold_McClintock%27s_sledge_flag_%281852%E2%80%931854%29.svg/120px-Francis_Leopold_McClintock%27s_sledge_flag_%281852%E2%80%931854%29.svg.png)



![Coat of arms of Utsjoki[citation needed]](http://upload.wikimedia.org/wikipedia/commons/thumb/e/e6/Utsjoki.vaakuna.svg/120px-Utsjoki.vaakuna.svg.png)



![Polaris, its surrounding integrated flux nebula, and NGC188[dubious – discuss]](http://upload.wikimedia.org/wikipedia/commons/thumb/1/10/Integrated_Flux_Nebula_Surrounding_Polaris_-_Kush_Chandaria.jpg/120px-Integrated_Flux_Nebula_Surrounding_Polaris_-_Kush_Chandaria.jpg)
Around 4800 years ago Thuban ( α Draconis) lay a mere 0°.1 from the pole. Deneb (
α Cygni) will be the brightest star near the pole in about 8000 years' time, at a distance of 7°.5.
cite book: ISBN / Date incompatibility (help)
|
|||||||||||||
| Stars |
|
||||||||||||
|
|||||||||||||
| Galaxies |
|
||||||||||||
|
|||||||||||||
|
|
|||||||||||||
|
Authority control databases
|
|
|---|---|
| International |
|
| National |
|
| Other |
|
|
|
This article may contain original research. (May 2009)
|
|
|
The examples and perspective in this article may not represent a worldwide view of the subject. (April 2013)
|
|
|
This article has multiple issues. Please help improve it or discuss these issues on the talk page. (Learn how and when to remove these messages)
|



Off-roading is the act of driving or riding in a vehicle on unpaved surfaces such as sand, dirt, gravel, riverbeds, mud, snow, rocks, or other natural terrain. Off-roading ranges from casual drives with regular vehicles to competitive events with customized vehicles and skilled drivers.[1]

Off-road vehicles are either capable of or specifically developed for off-road driving. These vehicles often have features designed specifically for use in off-road conditions such as suspension lifts, off-road tires, skid plates, snorkels, roll cages, or strengthened drivetrains.[2][3]

Dune bashing is a specific form of off-roading performed on sand dunes.[4]
Dune Buggies, Sport-utility vehicles, and ATVs are often used.[5] Vehicles driven on sand dunes are often equipped with a roll cage for safety in the case of an overturn. The tire pressure is often reduced to gain more traction by increasing the footprint of the tire and lowering the ground pressure of the vehicle on the sand, comparable to a person wearing snowshoes to walk on snow without sinking.[6] Some cars are equipped with beadlock wheels, which allow tire pressure to be lowered even further without risking separation of the tire and rim.
Upon entering the desert, it is customary for drivers to meet with a pack of other vehicles and a group leader before proceeding. The group leader then leads the pack through the stunts in a single file line. The rationale for this technique is to prevent drivers from becoming disoriented and getting lost.[6]
High-speed racing in the desert includes chases and racing at maximum speed through rough desert terrain with numerous pots and bumps. Drivers often use rear-wheel drive and 4-wheel drive trucks with long-travel suspension and wide stance between the front enlarged tires, which maintains optimal stability at high speed. These types of trucks are often called Trophy trucks or PreRunners.[7]
Rock racing involves driving over rocks, but unlike rock crawling, does not specify penalties for striking cones, backing up, or winching.[8] In addition, rock racing incorporates a level of high-speed racing that is not characteristic of rock crawling.
See article: Rally

Rallying is a wide-ranging form of motorsport with various competitive motoring elements such as speed tests (sometimes called "rally racing" in United States), navigation tests, or the ability to reach waypoints or a destination at a prescribed time or average speed. Rallies may be short in the form of trials at a single venue, or several thousand miles long in an extreme endurance rally.
Depending on the format, rallies may be organised on private or public roads, open or closed to traffic, or off-road in the form of cross country or rally-raid. Competitors can use production vehicles which must be road-legal if being used on open roads or specially built competition vehicles suited to crossing specific terrain.
In most cases rallying distinguishes itself from other forms of motorsport by not running directly against other competitors over laps of a circuit, but instead in a point-to-point format in which participants leave at regular intervals from one or more start points.

Mudding is off-roading through an area of wet mud or clay, leading to extremely low traction and problems with moving forward.[9] The goal is to drive as far as possible without getting stuck.[10] There are many types of tires that are often used for this activity, including balloon tires, mud-terrain tires and paddle tires. The activity is popular in the United States, although it is illegal on public land due to the environmental impact.[11]
Mud plugging, as practiced in the United Kingdom, refers to the motorsport of classic trials, where the main objective is to complete a challenging course of (mostly unpaved) roads and (often muddy, and frequently uphill) off-road terrain.[12]
This form of motorsport is one of the oldest to survive to this day, dating back at least to the 1920s.[13]

Rock crawling involves driving over rocky terrain, with the goal of getting as far as possible with the fewest penalties. Penalties are received for striking cones, using a winch to get unstuck, going out of bounds, and going in reverse. These rules lead to the sport being technical, with drivers having to plan ahead to reduce the penalties they receive. Vehicles used for rock crawling are usually modified with different tires, suspension components that allow greater axle articulation, and changes in the differential[14] gear ratio to obtain characteristics suitable for low-speed operation for traversing obstacles. Commonly, rock crawlers have a "spotter", who is an assistant on foot by the vehicle to provide information about areas out of the driver's field of view.[15]
All progress is made at low speed and the emphasis is on skill rather than on finishing first, although trialing can be highly competitive. There are three traditional forms of off-road trialing. During some competitive events, such as the Turkey Run in Idaho and other events around the United States, point systems may be used to determine rewards.
RTV (Road Taxed Vehicle) trialing is the most common form of trialing. As the name suggests, it is for vehicles that are road-legal (and thus required to pay road tax). This excludes vehicles that are highly modified or specially built. RTV-class vehicles can carry a wide range of suspension modifications, as well as off-road tires (provided they are road-legal), recovery winches, raised air intakes, etc. Vehicles on RTV trials are usually best described as "modified from standard"—they use the standard chassis, drive-train, and body that the vehicle was built with, but are fitted with a wide array of modifications to assist in the trailing. Whilst modification is not necessarily required for an RTV trial, at the very least the vehicle would be expected to have some underbody and over-the-body protection such as skid plates or roll cages, often made from durable stainless steel, aluminium or mild steel. RTV courses are intended to be non-damaging and driven at little more than a walking pace and a course properly laid out would be drivable without damage. However, the terrain usually includes steep slopes, water, side slopes, deep ruts, and other obstacles that could potentially damage a vehicle if mistakes are made or poor driving techniques are used. As such, the use of modifications can increase the chances of success.[16]
RTV trials usually take place on farmland, a quarry site, or at a dedicated off-road driving center and are usually organized by a dedicated trialing body (such as the All-Wheel Drive Club or the Association of Land Rover clubs in the UK, or by a vehicle owner's club. The course consists of 10 to 12 "gates" marked by two garden canes (sticks) and are vertically placed. The gates are just wide enough to get a standard vehicle through. Vehicles start in a stagger, proceeding one by one, and are deemed to have cleared a gate if at least one of the front wheel hubs passes between the canes. The vehicle's attempt ends when it comes to a stop (depending on the exact level of skill the trial is aimed at any stopping may end the attempt, or a few seconds may be allowed). Long-wheelbase vehicles are usually allowed to perform a three-point turn if needed, providing the driver declares where the turn is going to be made before they attempt the course (this puts a strong emphasis on ground-reading ability). This can also be called a "shunt", where the driver has to attempt a gate and then shout "shunt". They are then allowed a space of one and a half car lengths to reverse and line the car better to enter through the gate[17]
The course between the gates is a "section": between the start line and the first gate is "Section 1", the part between the first and second gates is "Section 2" and so on. An RTV course is often laid out so that each section is progressively more difficult, although this is not always the case. If a driver fails to complete Section 1 they are given 10 points. If the attempt ends in Section 2, 9 points are awarded, etc. A clear round results in gaining only 1 point. A day's event will consist of many different courses and the driver with the lowest score is the winner.
Since the terrain covered in RTV trials should be well within the capabilities of any reasonably capable vehicle (even in standard form), these trials emphasize driver skill and ground-reading abilities. Skill and experience have a larger bearing on success than having a well-equipped and modified car.
|
|
This section does not cite any sources. (October 2023)
|

Cross Country Vehicle (CCV) trialing is the next step up from RTV trialing and is open to non-road-legal vehicles, which greatly increases the scope for modification. The terrain covered will be of greater difficulty than that found on an RTV trial. Since there is a risk of touching rocks and trees with the bodywork,[18] CCV trialing will usually require more careful use of speed to get the vehicle across certain obstacles will attempting to mitigate the risk of vehicle damage. Whilst no trial is intended to be vehicle-damaging, mistakes and accidents are inevitable. A standard-specification vehicle would not be expected to be able to complete a CCV course, but it would still be possible.
The event is run along the same lines as RTV, with a course made up of cane-marked gates.

CCV trialing differs greatly from RTV trials in the vehicles used. Since CCV judges adopt an "anything goes" attitude, CCV trials rely on having the correct vehicle to a much greater extent than in an RTV trial. Competitors can design and build vehicles that are much more optimized for off-road use, than in the lower ranks of trialing. CCV vehicles have powerful engines, high ground clearance, light, minimalist bodywork, and good approach and departure angles. For many years, in the UK, the ultimate CCV vehicle could be built by taking the chassis of a Range Rover, removing the body, cutting the chassis down to an 80-inch wheelbase, and attaching it to the body of a Series I Land Rover, retaining the Range Rover's V8 engine and coil-spring suspension in a light, maneuverable body. In recent years, the value of early Land Rovers and Range Rovers has risen to the extent that this is no longer practical. CCV trailers now usually base their vehicles around Land Rover Defenders or a standard 100-inch chassis from a Range Rover or Series I Discovery. The Suzuki SJ series of vehicles also make good bases for CCV-spec vehicles. Some vehicles are specially built, taking the form of light "buggies" with tractor tires and "fiddle" brakes (fiddle brakes give the ability to lock a wheel, which enables much better turning, better control descending hills, traction control by slowing or locking the spinning wheel) for the best performance.
Vehicles are required to meet certain safety regulations. Roll-cages must be fitted and be built to a suitable standard, recovery points must be fitted front and rear and fuel tanks must meet certain standards. A 4-point harness for all occupants is required and a fire extinguisher is recommended.
|
|
This section does not cite any sources. (October 2023)
|

In some countries off-road activities are strictly regulated, while others promote cross-country off-road endurance events like the Dakar Rally, Spanish Baja, Africa Eco Race, Abu Dhabi Desert Challenge, Russian Baja Northern Forest, King of the Hammers, San Felipe 250 and Baja 500 & 1000, which are a test of navigation skills and machine durability. Off-road parks and motocross tracks also host several events and may be the only legal place to off-road in the area.

Off-road vehicle use on public land has been criticized by some members of the U.S. government[19] and environmental organizations including the Sierra Club and The Wilderness Society.[20][21] They have noted several consequences of illegal ORV use such as pollution,[22] trail damage, erosion, land degradation, possible species extinction,[23] and habitat destruction[24][25] which can leave hiking trails impassable.[26] ORV proponents argue that legal use taking place under planned access along with the multiple environment and trail conservation efforts by ORV groups will mitigate these issues.[27] Groups such as the BlueRibbon Coalition advocate for the responsible use of public lands for off-road activities.[28]
Noise pollution is also a concern[29] and several studies conducted by Montana State University, California State University, University of Florida and others have cited possible negative behavioral changes in wildlife as the result of some ORV use.[30]
Some U.S. states have laws to reduce noise generated by off-road and non-highway vehicles. Washington is one example: "State law requires off-road and other non-highway vehicles to use specified noise-muffling devices (RCW 46.09.120(1) (e) maximum limits and test procedures). State agencies and local governments may adopt regulations governing the operation of non-highway vehicles on property, streets, or highways within their jurisdiction, provided they are not less stringent than state law (RCW 46.09.180 regulation by local political subdivisions)".[31]
The U.S. Bureau of Land Management (BLM) supervises several large off-road vehicle areas in California's Mojave Desert.
In 2009, U.S. District Judge Susan Illston ruled against the BLM's proposed designation of additional off-road use on designated open routes on public land. According to the ruling, the BLM violated its regulations[32] when it designated approximately 5,000 miles (8,000 km) of off-road vehicle routes in 2006.[33] According to Judge Illston the BLM's designation was "flawed because it does not contain a reasonable range of alternatives" to limit damage to sensitive habitat, as required under the National Environmental Policy Act.[34] Illston found that the Bureau had inadequately analyzed the route's impact on air quality, soils, plant communities and sensitive species, such as the endangered Mojave fringe-toed lizard, pointing out that the United States Congress has declared that the California Desert and its resources are "extremely fragile, easily scarred, and slowly healed".[34]
The court also found that the BLM failed to follow route restrictions established in the agency's conservation plan, resulting in the establishment of hundreds of illegal OHV routes during the previous three decades.[32] The plan violated the BLM's regulations, specifically the Federal Land Policy and Management Act of 1976 (FLPMA) and the National Environmental Policy Act of 1969 (NEPA).[33] The ruling was considered a success for a coalition of conservation groups including the Friends of Juniper Flats, Community Off-road Vehicle Watch, California Native Plant Society, The Center for Biological Diversity, The Sierra Club, and The Wilderness Society who initiated the legal challenge in late 2006.[34]
Many U.S. national parks have discussed or enacted roadless rules and partial or total bans on ORVs. To accommodate enthusiasts, some parks like Big Cypress National Preserve in Florida, were created specifically for ORVs and related purposes. However, such designations have not prevented damage or abuse of the policy.[35]
In 2004, several environmental organizations sent a letter to Dale Bosworth, Chief of the United States Forest Service, and described the extent of damage caused by ORV use, including health threats to other people:
It is well-established that the proliferation of off-road vehicles and snowmobile use places soil, vegetation, air and water quality, and wildlife at risk through pollution, erosion, sedimentation of streams, habitat fragmentation and disturbance, and other adverse impacts to resources. These impacts cause severe and lasting damage to the natural environment on which human-powered and equestrian recreation depends and alter the remote and wild character of the backcountry. Motorized recreation monopolizes forest areas by denying other users the quiet, pristine, backcountry experience they seek. It also presents safety and health threats to other re-creationists.[36]
In 2004 the Supreme Court Justice Antonin Scalia listed several problems that result from ORV use in natural areas. From the Environmental News Service article:
Scalia noted that off-road vehicle use on federal land has "negative environmental consequences including soil disruption and compaction, harassment of animals, and annoyance of wilderness lovers.[37]
Several environmental organizations, including the Rangers for Responsible Recreation, are campaigning to draw attention to a growing threat posed by off-road vehicle misuse and to assist overmatched land managers in addressing ORV use impacts.[38] These campaigns in part have prompted congressional hearings about the growing impact of unmanaged off-road vehicle use.
The House Natural Resources Committee Subcommittee on National Parks, Forests and Public Lands held an oversight hearing on "The Impacts of Unmanaged Off-Road Vehicles on Federal Land" on March 13, 2008.[39] A second hearing on off-highway vehicle (OHV) management on public lands was held by the Senate Energy and Natural Resources Committee on June 5, 2008.[40] The Senate committee hearing was convened to find out why the agencies are failing to grapple with the negative impacts of off-road vehicle use on US public lands and what the agencies might need to start doing differently. For the first time in perhaps a decade, members of the Senate Energy and Natural Resources Committee grilled leaders of the Forest Service and the BLM about why off-road vehicle use is being allowed to damage America's national treasures.
Taking center stage in the discussion was the "travel planning process", a complex analysis and decision-making procedure to designate appropriate roads and trails. Both the Forest Service and BLM have been engaged in somewhat similar travel planning processes now for years, but some of the committee members didn't seem to think those processes were going along so well. "The BLM has identified travel management on its lands as ‘one of the greatest management challenges’ it faces," stated committee Chairman Jeff Bingaman, D-NM. "Likewise, the Forest Service has identified unmanaged recreation — including ORV use — as one of the top four threats to the management and health of the National Forest System. Despite these statements, it seems to me that neither agency has been able to successfully manage off-road use."
"Existing rules for managing off-road vehicles are not being enforced," Bingaman added, and the agencies are ignoring unregulated use "with significant consequences for the health of our public lands and communities, and adverse effects on other authorized public land uses."


Video games that allow users to off-road include Forza Horizon, Dirt Series, MudRunner, Grand Theft Auto V, Dakar Desert Rally, and the MotorStorm series.
![]() Media related to Off-roading at Wikimedia Commons
Media related to Off-roading at Wikimedia Commons






Great camping spot. On a hot day 41° it wasn't as bad as we expected. We were picked up from a location far away which is very convenient. We arrive at the location, and we transfer to offroad car, the driver wasn't fun at all that's why I gave 4 star, he wasn't speeding or doing aggressive maneuvers. I've been to other safari's and the sand was flying and hitting the windows. We arrive at camp and they told us we have food, sheesha, sand boarding, camel ride, henna, and soft drinks for free. But they will negotiate everything to pay extra. Extra for camel ride for extra time. Extra for food to stay VIP on top of the camping, extra for sheesha to take it to ur table, extra to give you pic with camel, extra to sell you arabian dress, extra for bigger henna. The experience was very nice. We enjoyed the sunset, didn't get the chance to snowboard or try sheesha. The food was acceptable.

A unique experience. We had a wonderful time with our driver, Arham, who took some amazing photos of us. We wholeheartedly recommend him!

It was an amazing experience driving through the desert with a 4x4, having a great dinner in the camp with good entertainment. And our driver Mohammed was awesome: very friendly, always pointing out interesting things to see and thankfully very skilled when driving through the dunes.

Arabian Nights Tours Camp in Abu Dhabi, UAE, offers an immersive desert adventure experience. Located in the heart of the Arabian desert, the camp provides guests with a traditional Bedouin-style setting, complete with comfortable tents and authentic decor. Visitors can enjoy a range of activities, including dune bashing, camel rides, and sandboarding. The camp also features cultural entertainment such as belly dancing, henna painting, and traditional music. Guests are treated to a sumptuous buffet of Arabic cuisine under the stars, making for a memorable and picturesque desert experience. Arabian Nights Tours Camp combines adventure, culture, and relaxation in a stunning desert landscape.

One of the best Desert Safari organizers in Dubai, highly recommended. They do it in a very professional manner. They are always on time, the drivers are more than qualified to give you the full dune bashing experience with the sense of responsibility to the guests safety. The vehicles are in a high condition to give the guests the comfort needed during the journey from the pick up point and during every moment of the trip. The location of the camp is taking in consideration the weather condition. The food quality and quantity is high and the show is interesting. The bathroom condition is great, neat and clean and in a convenient spot within the camp. All this for a very reasonable and competitive price.
For Buggy Ride Dubai, wear comfortable, lightweight clothing that covers your arms and legs. Closed-toe shoes are mandatory - avoid sandals or flip-flops. Bring sunglasses, sunscreen, and a light scarf to protect against sand. Avoid loose or baggy clothing that might get caught.
No driving license is required for Buggy Ride Dubai. Our expert guides provide comprehensive safety briefings and driving instructions before your adventure begins. This makes our buggy rides accessible to anyone aged 16 and above, regardless of their driving experience.
For safety reasons, pregnant women cannot participate in Buggy Ride Dubai activities due to the challenging terrain and physical nature of dune bashing. We prioritize the health and safety of all guests and recommend alternative desert experiences like camel rides.





